
波特图

波德图(英语:Bode plot,“Bode”的英文发音类似Boh-dee,荷兰文的发音则类似Bow-dah),又名伯德图,是线性非时变系统的传递函数对频率的半对数座标图,其横轴频率以对数尺度表示,利用波德图可以看出系统的频率响应。波德图一般是由二张图组合而成,一张幅频图表示频率响应增益的分贝值对频率的变化,另一张相频图则是频率响应的相位对频率的变化。[1]
波德图可以用电脑软体(如MATLAB)或仪器绘制,也可以自行绘制。利用波德图可以看出在不同频率下,系统增益的大小及相位,也可以看出大小及相位随频率变化的趋势[2]。
波德图的图形和系统的增益,极点、零点的个数及位置有关,只要知道相关的资料,配合简单的计算就可以画出近似的波德图,这是使用波德图的好处。
简介[编辑]
波德图是由贝尔实验室的荷兰裔科学家亨德里克·韦德·波德在1930年发明。波德用简单但准确的方法绘制增益及相位的图,因此他发明的图也就称为波德图。[3]
波德图幅频图的频率用对数尺度表示,增益部份一般都用功率的分贝值来表示,也就是将增益取对数后再乘以10。由于增益用对数来表示,因此一传递函数乘以一常数,在波德增益图只需将图形的纵向移动即可,二传递函数的相乘,在波德幅频图就变成图形的相加。幅频图纵轴0分贝以下具有正增益裕度、属稳定区,反之属不稳定区:

波德图相频图的频率也用对数尺度表示,而相位部份的单位一般会使用度。配合波德相频图可以估算一信号进入系统后,输出信号及原始信号的比例关系及相位。例如一个Asin(ωt) 的信号进入系统后振幅变原来的k倍,相位落后原信号Φ,则其输出信号则为(A k) sin(ωt − Φ),其中的k和Φ都是频率的函数。相频图纵轴-180度以上具有正相位裕度、属稳定区,反之属不稳定区
若将系统的增益以复数表示,则复数增益取对数后的虚部即为相位,因此二传递函数的相乘,在波德相位图上也是图形的相加。

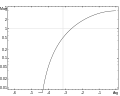
以下考虑有一个极点的高通滤波器、如图2:

其中 f 是频率,f1是极点的位置,单位都是Hz。图中f1 = 100 Hz。此传输函数的绝对值为:

其相位为:

由于波德相位图的纵轴相位使用角度而不是弪度,需要使用对应角度的反正切函数。波德增益图的纵轴是转换函数的分贝,其数值如下:

如下图3是一个单一极点低通滤波器的波德图:

于图3中也有用直线近似的波德图,常在自行绘制波德图时使用,其原理会在后面的章节中说明。
波德图的增益和相位很难单独的变动、二者会互相牵扯,当调整系统的增益响应时,系统的相位响应也会随之变化,反之亦然。最小相位系统的增益和相位特性之间可以用希尔伯特转换来转换,因此知道其中一项即可求出另外一项。
若转换函数是有理函数,其零点及极点均为实数,则其波德图可以用几条渐近线的直线来近似,利用简单的规则即可以徒手绘制。若近似的波德图再修正每个截止频率时的增益值,则其近似值会更接近实际值。
波德图手绘的规则[编辑]
波德图的前提就是可以处理以下型式函数的对数值:

上述函数的对数值可以转换为极点及零点对数的和:

在绘制波德相位图时直接使用了上述的概念。增益图的绘制时则是以此概念为基础,因为每个极点或零点其增益的对数均从0开始,而且其渐近线只有一个转折点,因此绘制时可以再作简化。
直线近似的增益图[编辑]
波德图增益分贝值一般都利用的公式。考虑以下的转换函数:


其中及是常数,, ,而H是转换函数。




- 在每个对应(零点)的位置,将直线的斜率增加/十倍频[注解 1]。
- 在每个对应(极点)的位置,将直线的斜率减少/十倍频。
- 图在起始点时的增益值,可以依照图中的角频率下限,计算其对应的|H(jω)|。
- 图在起始点时的斜率则依照有多少零点及极点低于角频率下限,再依上述二个方式计算斜率,若所有点及极点均高于角频率下限,起始点时的斜率为零。




在处理无法分解的二次多项式时,多半可以用的方式近似。


修正后的增益图[编辑]
直线近似的增益图可以用以下方式修正:
- 针对每个零点,在直线上方的位置增加一点。
- 针对每个极点,在直线下方的位置增加一点。
- 以原来的直线为渐近线绘制平滑曲线,通过上述各点,即为修正后的增益图。

上述的修正方式只针对实数的极点或零点。若或为复数时,比较好的作法仍是找出无法分解的二次式,计算其在零点(或极点)附近的数值,再依数值决定要在直线上方或下方加点。
直线近似的相位图[编辑]
考虑一个以下型式的传递函数:
可以先依每个极点及零点分别绘制相位图,再将各相位图相加。相位图的曲线为以下的反正切函数。
![{\displaystyle -\mathrm {arctan} (\mathrm {Im} [H(s)]/\mathrm {Re} [H(s)])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ab16c65248c65455a92c4816a3e6bc1bb8251b31)
在绘制相位图时,针对每个极点及零点:
- 若A为正数,其对应的相位图是0度的水平线。
- 若A为负数,其对应的相位图是180度的水平线。
- 对每个稳定的零点(其零点满足 ,即),低于的部份为相位为0度的水平线,之后的直线斜率为+度/十倍频,到为止,该点的相位为+度,超过此频率的部份为相同相位的水平线。
- 对每个稳定的极点(其极点满足 ,即),低于的部份为相位为0度的水平线,之后的直线斜率为-度/十倍频,到为止,该点的相位为-度,超过此频率的部份为相同相位的水平线。
- 若是不稳定的零点(或极点),其相位增加或减少的趋势恰与上述相反。
- 将所有的相位图相加,即为传递函数的完整相位图。












简易传递函数的波德图趋势[编辑]
以下是常见简易传递函数的波德图趋势:
| 传递函数 | 范例图形 | 波德增益图 | 波德相位图 |
|---|---|---|---|

|
若 K > 0,相位为 0 若 K < 0,相位为180度 | ||

|
斜率+20dB/十倍频的斜线,的增益为0dB | 固定为+90度 | |

|
斜率-20dB/十倍频的斜线,的增益为0dB | 固定为-90度 | |
(稳定零点) |

|
以下增益为0dB水平线,以上则以+20 dB/十倍频的斜率上升 | 以下相位为0度水平线,以上相位为+90度水平线,中间以+45度/十倍频的斜线上升,的相位为+45度 |
(稳定极点) |

|
以下增益为0dB水平线,以上则以-20 dB/十倍频的斜率下降 | 以下相位为0度水平线,以上相位为-90度水平线,中间以-45度/十倍频的斜线下降,的相位为-45度 |
(不稳定零点) |

|
以下增益为0dB水平线,以上则以+20 dB/十倍频的斜率上升 | 以下相位为0度水平线,以上相位为-90度水平线,中间以-45度/十倍频的斜线下降,的相位为-45度 |
(不稳定极点) |

|
以下增益为0dB水平线,以上则以-20 dB/十倍频的斜率下降 | 以下相位为0度水平线,以上相位为+90度水平线,中间以+45度/十倍频的斜线上升,的相位为+45度 |

|
以下增益为0dB水平线,以上则以-40 dB/十倍频的斜率下降 | 以下相位为0度水平线,以上相位为-180度水平线,中间区域的特性则随d不同而不同 |













举例[编辑]



另一种等效表示法为

其中为截止角频率,单位是弧度每秒。

以角频率表示的转换函数如下

上述的方程式是一个正规化后的转换函数,其波德图如图3,后续将介绍如何用直线来近似波德图。
增益图[编辑]
上述转换函数的增益(以分贝表示)和频率的关系如下:

![{\displaystyle {\begin{aligned}A_{\mathrm {vdB} }&=20\log |H(j\omega )|=20\log {1 \over \left|1+j{\omega \over {\omega _{\mathrm {c} }}}\right|}\\&=-20\log \left|1+j{\omega \over {\omega _{\mathrm {c} }}}\right|=-10\log {\left[1+{\frac {\omega ^{2}}{\omega _{\mathrm {c} }^{2}}}\right]}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c5f6369d343b45ecff3d44b065da241b676e0d48)
若在对数尺度的频率下绘制不同频率的增益,上式可以用二条直线近似,而这二条线也就是其波德图增益图的二条渐近线:

- 在角频率小于时,因项较小,相对 1 而言可以忽略,因此其增益值为定值1,在增益图上是一条位在0dB的水平线。
- 在角频率大于时,因项比较大,相对而言 1 可以忽略,因此式子简化为,是斜率为-20dB/十倍频的斜线。[4]



上述的二条线在截止频率处交会,在图3可以看出,当频率远低于截止频率时,电路的衰减量是0dB,对应其通带增益为 1,此时滤波电路的输出值和输入值相同,而当频率高于截止频率时,信号会被电路衰减,越高频的信号其衰减量越大。

相位图[编辑]
上述转换函数的相位和频率的关系如下

其中, 分别是输入角频率及截止角频率。 当输入角频率远小于截止角频率时(),比例的数值很小,因此相位角接近零度。当频率增加,相位角的绝对值也随之增加。在()时为-45度。当输入角频率远大于截止角频率时(>>,→∞),相位角会趋近-90度。


正规化图[编辑]
波德图(包括幅频图及幅相图)的横轴频率部份均可以用正规化的频率(无因次频率,)表示。此时的图称为正规化的波德图,而且其中不需考虑频率的单位,因为频率已改用频率和截止频率的比值来表示。
有极点和零点的范例[编辑]
图4至图7是有极点和零点的波德图,可用来说明如何叠加不同极点的零点的图形,得到完整的波德图。
- 有极点和零点的范例
-
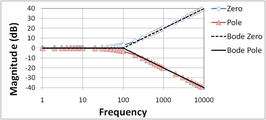 图4:零点和极点的增益图,标示"Bode"的是直线近似的增益图
图4:零点和极点的增益图,标示"Bode"的是直线近似的增益图 -
 图5:零点和极点的相位图,标示"Bode"的是直线近似的相位图
图5:零点和极点的相位图,标示"Bode"的是直线近似的相位图


图4是一个零点及极点(在相同频率)的波德增益图,及其直线近似的增益图。以直线近似的图来看,在频率小于零点(或极点)时其增益图为一水平线,超过零点(或极点)100后以20dB/十倍频的斜率上升(或下降)。图5则为其相位图及直线近似的版本,在频率小于零点(或极点)的十分之一时,其相位图为一水平线,超过(10)之后以45度/十倍频的斜率上升(或下降),直到等于零点(或极点)的十倍(1000)为止,之后相位图为一数值为+90度(或-90度)的水平线。
- 有极点和零点的范例
-
 图6:有零点和极点系统的增益图,其中零点的频率为极点的十倍,标示"Bode"的是直线近似的增益图
图6:有零点和极点系统的增益图,其中零点的频率为极点的十倍,标示"Bode"的是直线近似的增益图 -
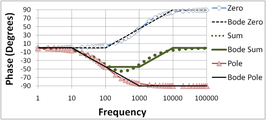 图7:有零点和极点系统的相位图,其中零点的频率为极点的十倍,标示"Bode"的是直线近似的相位图
图7:有零点和极点系统的相位图,其中零点的频率为极点的十倍,标示"Bode"的是直线近似的相位图


图6及图7分别是有一个极点及零点的系统的波德增益图及波德相位图,其中零点的频率为极点的十倍。图6中因为极点中的影响,在频率超过100极点后,波德极点增益会以-20dB/十倍频的斜率下降,但到1000时,因波德零点增益会以+20dB/十倍频的斜率上升,抵消极点的影响,因此在频率超过1000之后,增益为一定值。
图7的相位图中,在高频(频率高于零点十倍)及低频(频率高于极点十分之一)处,其相位都为0度,低频相位为零是因为零点及极点对相位的贡献均为0度,高频相位为零是因为零点及极点对相位的贡献分别为+90度及-90度,互相抵消后总相位为0度。而中间的区域因极点及零点的相位抵消后不为零,因此可以看出其相位的变化。
在系统稳定性的应用[编辑]
波德图可用来计算负反馈系统的增益裕度(gain margin)及相位裕度,进而确认系统的稳定性。
相关符号定义[编辑]
先定义以下的符号:

其中
- AFB是考虑反馈时的放大器增益(闭回路增益)
- β是反馈系数
- AOL是不考虑反馈时的放大器增益(开回路增益)。
在开回路增益AOL远大于1时,闭回路增益AFB可以用以下方式近似

在开回路增益AOL远小于1时,闭回路增益AFB可以用以下方式近似

增益AOL是频率的复变函数,有大小及相位。[注解 2]
上述的式子中,若βAOL乘积=−1时,可能会出现增益无穷大(即为不稳定)的情形。(若用大小和相位来表示,此时βA的大小为1,相位为-180度,此条件会满足巴克豪森稳定性准则)。配合波德图,不但可以判断系统是否稳定,也可以判断系统接近以上不稳定条件的程度。
在判断系统稳定性时,会用到以下二个频率。第一个频率f180是上述乘积相位恰为-180度的频率,第二个频率f0dB则为乘积的绝对值|β AOL|=1时的频率(若以分贝表示时,则为0dB)。频率f180可以用下式来计算:

其中| |表示复数的绝对值(例如| a + j b | = [ a2 + b2]1/2)。而频率f0dB有以下的关系:

增益裕度及相位裕度[编辑]
增益裕度[编辑]
增益裕度(gain margin, GM)是衡量系统稳定程度的一种方法。在波德相位图上可以找到βAOL相位到达-180度时的频率,该频率即为f180,之后就可以在增益图上找到该频率时βAOL的大小。
若|βAOL|180 > 1,表示此系统不稳定。若|βAOL|180 < 1,此系统稳定,而|βAOL|分贝值和0dB(对应增益大小为1)的距离表示系统距离不稳定的程度,称为增益裕度。
增益裕度也可以用下式表示:

相位裕度[编辑]
相位裕度(phase margin, PM)是另一种衡量系统稳定程度的方法。在波德增益图上可以找到|βAOL|大小为1的频率,该频率即为f0dB,之后就可以在相位图上找到该频率时βAOL的相位。
若βAOL( f0dB) 的相位 > −180°,表示在任何频率时系统都会稳定,因为在f180时大小已小于1,f0dB时的相位和-180度之间的差称为相位裕度。
若只是单纯要判断系统是否稳定,在系统为最小相位系统时,若以下的式子成立,则系统稳定:

若是非最小相位系统,需要用其他方式判断稳定性,如奈奎斯特图[5][6]。
举例[编辑]
临界稳定系统 1/β = 58 dB[编辑]
- 增益裕度及相位裕度范例,1/β = 58 dB
-
 图8:放大器的波德增益图,其中有以分贝表示的闭回路增益AFB及开回路增益AOL,参数1/β = 58 dB,低频时AFB ≈ 58 dB,因为 | βAOL| = 1 出现的频率和f180°的频率非常接近,其增益裕度几乎为0。
图8:放大器的波德增益图,其中有以分贝表示的闭回路增益AFB及开回路增益AOL,参数1/β = 58 dB,低频时AFB ≈ 58 dB,因为 | βAOL| = 1 出现的频率和f180°的频率非常接近,其增益裕度几乎为0。 -
 图9:放大器的波德相位图,其中有以度表示的闭回路相位°AFB及开回路相位°AOL,因为相位到-180度的位置非常接近f = f0dB(即 | βAOL| = 1)的频率,因此相位裕度也很接近零度。
图9:放大器的波德相位图,其中有以度表示的闭回路相位°AFB及开回路相位°AOL,因为相位到-180度的位置非常接近f = f0dB(即 | βAOL| = 1)的频率,因此相位裕度也很接近零度。


图8及图9可说明增益裕度及相位裕度在实际系统中的应用。图8是一个放大器的波德增益图,图中有绘出不考虑反馈的增益大小(开回路增益)AOL及考虑反馈的增益大小(闭回路增益)AFB。在负反馈放大器条目中有进一步的说明。
在此例中,低频的AOL = 100 dB,而1/β=58dB。低频时AFB的近似值也是58dB。
因为图中只绘出开回路增益AOL,不是β AOL,因此判断f0dB的条件改为AOL = 1 / β。在低频时βAOL远大于1,AFB可近似为 1 /β,因此可以用AFB代替 1 /β,因此AFB及AOL相交的位置即为f0dB(后续在计算相位增益时需要频率f0dB)。
在f0dB附近,闭回路增益有很大的突波,因此该频率时β AOL可能很接近-1(若β AOL=-1,就会有无穷大的增益)。频率超过f0dB之后,AOL远小于1,因此AFB可近似为 AOL。
图9则是二种增益在相位上的比较,低频时闭回路增益的相位接近0度,但在频率=f180时,开回路增益的相位为-180度,而闭回路增益突然下降到几乎-180度的位置。因开回路增益相位为−180度,因此相位裕度为0度(-180度-(-180度)=0度)。(参阅简介)
根据图8及图9,可以看出此放大器的零分贝频率f0dB及相位反转频率f180非常接近:f180 ≈ f0dB ≈ 3.332 kHz,而3.332 kHz对应之开回路增益为58dB(1/β = 58 dB),58db-58dB=0dB。因此增益裕度及相位裕度都非常接近零,此系统为临界稳定。
稳定系统 1/β = 77 dB[编辑]
- 增益裕度及相位裕度范例,1/β = 77 dB
-
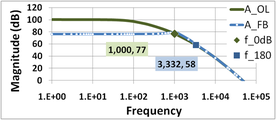 图10:放大器的波德增益图,其中有以分贝表示的闭回路增益AFB及开回路增益AOL,参数1/β = 77 dB,增益裕度为19 dB。
图10:放大器的波德增益图,其中有以分贝表示的闭回路增益AFB及开回路增益AOL,参数1/β = 77 dB,增益裕度为19 dB。 -
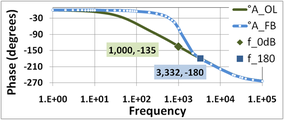 图11:放大器的波德相位图,其中有以度表示的闭回路相位°AFB及开回路相位°AOL,相位裕度为45度。
图11:放大器的波德相位图,其中有以度表示的闭回路相位°AFB及开回路相位°AOL,相位裕度为45度。


图10和图11是在较小反馈系数β(1 / β = 77 dB)时,同一系统的波德图,由于β较小,因此| β AOL | = 1出现在较低的频率,而低频时AFB也是近似1/β(77 dB)。
图10是波德增益图。1 / β及AOL的曲线在f0dB = 1 kHz时相交。在f0dB附近闭回路增益AFB没有明显的突波[注解 3][7]。
图11是波德相位图。利用增益图上得到的f0dB = 1 kHz,对应的开回路相位为−135度,因此相位裕度为正45度(-135度-(-180度)=45度)。(参阅简介)
图11和图9的函数只有反馈系数β不同,其开回路的波德相位图均相同,因此图11的f180和图9相同,都是3.332 kHz。[注解 4]对应的开回路增益为58dB,和1/β=77dB比较,增益裕度为19dB。而相位裕度为正45度,此为〈稳定系统〉。
在比较放大器的响应时,稳定性不是唯一的重点,在许多应用中良好的阶跃响应比稳定性更重要。依照经验法则,良好的阶跃响应需要至少45度的相位裕度,若将制造时元件参数偏差一并列入考虑,理想的相位裕度最好要超过70度。[8]在阶跃响应条目有关相位裕度的段落中有更深入的说明。
波德分析仪[编辑]

波德分析仪(Bode plotter)是一种类似示波器的仪器,可以量测反馈控制系统或滤波器在各频率的增益及相位变化,绘制成波德图。右图即为一例,波德测试仪可以量测系统的截止频率、增益裕度及相位裕度,在分析或测试系统的稳定性时很有帮助。
波德分析仪的功能和网路分析仪一様,不过网路分析仪一般会用来分析相当高频时的系统特性。
在教育或研究的应用上,利用波德分析仪绘制特定传递函数的波德图也可助于了解该系统的特性。
其他相关图[编辑]
奈奎斯特图和尼柯尔斯图都和波德图有关,这些图和波德图都是显示频率响应的资料,不过使用的座标系统不同。奈奎斯特图和尼柯尔斯图都是以频率为其参数的参数方程。奈奎斯特图将各频率的频率响应以极座标的方式绘出,因此各点距原点的距离是增益,各点相对原点的角度是相位。尼柯尔斯图即是将频率响应的增益(纵轴)及相位(横轴)均以线性刻度表示、用直角坐标系的方式绘出,其中增益使用对数尺度()。

- 相关图
-

-
 同一频率响应的尼柯尔斯图。
同一频率响应的尼柯尔斯图。


相关条目[编辑]
注解[编辑]
- ^ 由于波德增益图的横轴为对应尺度,斜率的单位常用“dB/十倍频”(dB/decade),以+20dB/十倍频为例,在频率为原来十倍时,增益会增加20dB,波德相位图的斜率则用“度/十倍频”表示。
- ^ 一般而言,频率上升时增益的大小会下降,而增益的相位也会往负值移动。不过这个只是趋势,有时在特定的频率区域,增益可能不会遵循上述的关系,此时增益裕度及相位裕度的概念就不适用,不过还是可以用其他方法(如奈奎斯特图来判断稳定性)
- ^ 利用巴特沃斯滤波器可以使闭回路增益的波峰降到最小
- ^ f180是相位到达-180度的频率,在此实数的反馈系数β只会影响增益的大小,不会影响相位。
参考文献[编辑]
- ^ I.J.Nagrath; M.Gopal. Control System Engineering. Wiley. 1984: 252. ISBN 957-9590-53-2.
- ^ What Bode Plots Represent (PDF). [2010-09-21].[永久失效链接]
- ^ Van Valkenburg, M. E. University of Illinois at Urbana-Champaign, "In memoriam: Hendrik W. Bode (1905-1982)", IEEE Transactions on Automatic Control, Vol. AC-29, No 3., March 1984, pp. 193-194. Quote: "Something should be said about his name. To his colleagues at Bell Laboratories and the generations of engineers that have followed, the pronunciation is boh-dee. The Bode family preferred that the original Dutch be used as boh-dah."
- ^ Richard C. Dorf; Robert H. Bishop. Modern Control Systems. Addison Wesley. 1995: 395. ISBN 0-201-50174-0.
- ^ Thomas H. Lee. The design of CMOS radio-frequency integrated circuits Second Edition. Cambridge UK: Cambridge University Press. 2004: §14.6 pp. 451–453 [2010-09-21]. ISBN 0-521-83539-9. (原始内容存档于2009-02-05).
- ^ William S Levine. The control handbook: the electrical engineering handbook series Second Edition. Boca Raton FL: CRC Press/IEEE Press. 1996: §10.1 p. 163 [2010-09-21]. ISBN 0849385709. (原始内容存档于2017-08-26).
- ^ Willy M C Sansen. Analog design essentials. Dordrecht, The Netherlands: Springer. 2006: §0517-§0527 pp. 157–163 [2010-09-21]. ISBN 0-387-25746-2. (原始内容存档于2009-05-30).
- ^ Willy M C Sansen. §0526 p. 162. [2010-09-21]. ISBN 0-387-25746-2. (原始内容存档于2009-05-30).
外部链接[编辑]
| 维基共享资源上的相关多媒体资源:波德图 |
- 详细的波德图解释[永久失效链接](英文)
- 波德图的解释,有影片及范例(英文)
- 如何绘直线近似的波德图 (页面存档备份,存于互联网档案馆)(英文)
- 如何波德图绘法摘要 (英文, PDF)
- Bode plot applet - 可输入转换函数的系数,计算增益大小及相位
- 电化学中的电路分析 (页面存档备份,存于互联网档案馆)(英文)
- Tim Green: Operational amplifier stability (页面存档备份,存于互联网档案馆)包括一些波德图的简介
- A4空白波德图(pdf)
| ||||||||||||||||||||||||||||||||