勞斯陣列是劳斯–赫尔维茨稳定性判据中,用來判斷系統是否穩定的方式,是透過系統的特徵多項式係數所建立的陣列。勞斯陣列和勞斯–赫爾維茨理論是古典控制理論的核心,結合了歐幾里得算法和施图姆定理來計算柯西指標。
柯西指標[编辑]
給定系統

假設 的根都不在虛軸上,並且令
的根都不在虛軸上,並且令
 = 是的根的實部為負數的個數,
= 是的根的實部為負數的個數, = 是的根的實部為正數的個數,
= 是的根的實部為正數的個數,
因此可得

將 以極座標型式表示,可得
以極座標型式表示,可得

其中
![{\displaystyle \rho (x)={\sqrt {{\mathfrak {Re}}^{2}[f(x)]+{\mathfrak {Im}}^{2}[f(x)]}}\quad (5)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f3342273646dc0f1235561b387b7af52e776938a)
且
![{\displaystyle \theta (x)=\tan ^{-1}{\big (}{\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]{\big )}\quad (6)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f7b2086266668256c2065a93ae151bb2aba594d0)
根據(2)會發現

其中

若的第i個根的實部為正,則(用y=(RE[y],IM[y])的表示法)
![{\displaystyle {\begin{aligned}\theta _{r_{i}}(x){\big |}_{x=-j\infty }&=\angle (x-r_{i}){\big |}_{x=-j\infty }\\&=\angle (0-{\mathfrak {Re}}[r_{i}],-\infty -{\mathfrak {Im}}[r_{i}])\\&=\angle (-|{\mathfrak {Re}}[r_{i}]|,-\infty )\\&=\pi +\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {3\pi }{2}}\quad (9)\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8b5b7395910dafa111cef24840a04b6f678dde27)
且
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j0}=\angle (-|{\mathfrak {Re}}[r_{i}]|,0)=\pi -\tan ^{-1}0=\pi \quad (10)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a8a52bccf4aeb16d032d5a102c1ae9bc8b6bcd1f)
且
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j\infty }=\angle (-|{\mathfrak {Re}}[r_{i}]|,\infty )=\pi -\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {\pi }{2}}\quad (11)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/838372f37cf13c3c184a2477039b676104cb7a5f)
同樣地,若的第i個根的實部為負,
![{\displaystyle {\begin{aligned}\theta _{r_{i}}(x){\big |}_{x=-j\infty }&=\angle (x-r_{i}){\big |}_{x=-j\infty }\\&=\angle (0-{\mathfrak {Re}}[r_{i}],-\infty -{\mathfrak {Im}}[r_{i}])\\&=\angle (|{\mathfrak {Re}}[r_{i}]|,-\infty )\\&=0-\lim _{\phi \to \infty }\tan ^{1}\phi =-{\frac {\pi }{2}}\quad (2)\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/de58d21c449a38a7a60691d0083d7d1d5a467d67)
且
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j0}=\angle (|{\mathfrak {Re}}[r_{i}]|,0)=\tan ^{-1}0=0\,\quad (13)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f0af975bb9b398ec5e8cf3b476787d1db575c52d)
且
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j\infty }=\angle (|{\mathfrak {Re}}[r_{i}]|,\infty )=\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {\pi }{2}}\,\quad (14)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec04aab88fc87619bb9b6771313b6b3e63ccb771)
由(9)至(11)式可知,若的第i個根實部為正,則 ,由(12)至(14)式可知,若的第i個根實部為負,則
,由(12)至(14)式可知,若的第i個根實部為負,則 。因此
。因此

若定義

則可以得到以下的關係

結合(3)式及(17)式可得
 且
且
因此,給定 次的方程,只需要計算
次的方程,只需要計算 ,就可以得到根的實部為負的個數,以及根的實部為正的個數。
,就可以得到根的實部為負的個數,以及根的實部為正的個數。

|
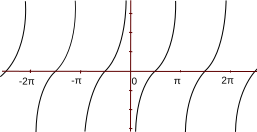
| 圖1
|
 相對 相對 的圖 的圖
|
配合(6)式及圖1,相對的圖,將 在區間(a,b)之間變化,其中
在區間(a,b)之間變化,其中 ,而
,而 ,都是
,都是 的整數倍,若此變化會使函數
的整數倍,若此變化會使函數 增加,表示在從點a到點b的過程中,
增加,表示在從點a到點b的過程中,![{\displaystyle \tan \theta (x)={\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/517bdc0afc4cdf73846d5681bfd6527a3189b43f) 從
從 「跳到」
「跳到」 的次數比從「跳到」的次數多一次。相反的,此變化會使函數減少,表示在從點a到點b的過程中,從「跳到」的次數比從「跳到」的次數少一次。
的次數比從「跳到」的次數多一次。相反的,此變化會使函數減少,表示在從點a到點b的過程中,從「跳到」的次數比從「跳到」的次數少一次。
因此, 是
是![{\displaystyle {\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2f620a737220c91bbf20684bf6b26abd7231b22c) 從跳到的次數,減掉同函數從跳到的次數,兩者差的倍。假設在
從跳到的次數,減掉同函數從跳到的次數,兩者差的倍。假設在 處,
處,![{\displaystyle \tan[\theta (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1add4cb96e2e9fde725301edaec88e5603cbf8ef) 有定義
有定義
|
| 圖2
|
 相對的圖 相對的圖
|
若起始點是在不連續點( , i = 0, 1, 2, ...),則因為公式(17)(和都是整數,因此也是整數),其結束點也會在不連續點。此時可以調整指標函數(正跳躍和負跳躍的差值)的計算方式,將正切函數的X軸移動
, i = 0, 1, 2, ...),則因為公式(17)(和都是整數,因此也是整數),其結束點也會在不連續點。此時可以調整指標函數(正跳躍和負跳躍的差值)的計算方式,將正切函數的X軸移動 ,也就是在上加。此時的指標函數在各種的係數組合下都有定義,就是在起始點(及結束點)連續的區間(a,b) =
,也就是在上加。此時的指標函數在各種的係數組合下都有定義,就是在起始點(及結束點)連續的區間(a,b) =  內計算
內計算![{\displaystyle \tan[\theta ]={\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1ac74db804df37ddb6ef8ff4d6f721bd086850a8) ,再在起始點連續的區間,計算
,再在起始點連續的區間,計算
![{\displaystyle \tan[\theta '(x)]=\tan[\theta +\pi /2]=-\cot[\theta (x)]=-{\mathfrak {Re}}[f(x)]/{\mathfrak {Im}}[f(x)]\quad (19)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e718d1233f9c08d6cb4344dae637f97bc9804db)
差值是從正跳躍和負跳躍的差值,若計算從 到
到 所產生的差值,即為相角正切的柯西指標,其相角為或
所產生的差值,即為相角正切的柯西指標,其相角為或 ,視
,視 是否是的整數倍而定。
是否是的整數倍而定。
勞斯準則[编辑]
為了要推導勞斯準則,會將的奇次方項和偶次方項分開來列:

因此可得到

若為偶數:
![{\displaystyle {\begin{aligned}f(j\omega )&=(-1)^{n/2}{\big [}a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+a_{2}\omega ^{n-4}-\cdots {\big ]}&{}\quad (23)\\&+j(-1)^{(n/2)-1}{\big [}b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+b_{2}\omega ^{n-5}-\cdots {\big ]}&{}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4e495902015ba0b7f57501e6d3d82ee9ab5ef62a)
若為奇數:
![{\displaystyle {\begin{aligned}f(j\omega )&=j(-1)^{(n-1)/2}{\big [}a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+a_{2}\omega ^{n-4}-\cdots {\big ]}&{}\quad (24)\\&+(-1)^{(n-1)/2}{\big [}b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+b_{2}\omega ^{n-5}-\cdots {\big ]}&{}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2031e504dd4c89445e158080035a39a2e0e17c2b)
可以看出若為奇數,根據(3)式, 為奇數。若為奇數,
為奇數。若為奇數, 也是奇數。同樣的,若 是偶數,也是偶數。(15)式可以看出若是偶數,是的整數倍。因此在為偶數時,有定義,是n為偶數時使用的正確指標,在而在為奇數時,
也是奇數。同樣的,若 是偶數,也是偶數。(15)式可以看出若是偶數,是的整數倍。因此在為偶數時,有定義,是n為偶數時使用的正確指標,在而在為奇數時, 有定義,也是n為奇數時使用的正確指標。
有定義,也是n為奇數時使用的正確指標。
因此,根據(6)式及(23)式,為偶數時:
![{\displaystyle \Delta =I_{-\infty }^{+\infty }{\frac {-{\mathfrak {Im}}[f(x)]}{{\mathfrak {Re}}[f(x)]}}=I_{-\infty }^{+\infty }{\frac {b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+\cdots }{a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+\ldots }}\quad (25)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d9829781584a0ac5eac8c828f3b075583bb496da)
因此,根據(19)式及(24)式,為奇數時:
![{\displaystyle \Delta =I_{-\infty }^{+\infty }{\frac {{\mathfrak {Re}}[f(x)]}{{\mathfrak {Im}}[f(x)]}}=I_{-\infty }^{+\infty }{\frac {b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+\ldots }{a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+\ldots }}\quad (26)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3d8786a9be2f8a0f8cff61b436453fa922966c5d)
因此可以計算相同的柯西指標:

參考資料[编辑]
- Hurwitz, A., "On the Conditions under which an Equation has only Roots with Negative Real Parts", Rpt. in Selected Papers on Mathematical Trends in Control Theory, Ed. R. T. Ballman et al. New York: Dover 1964
- Routh, E. J., A Treatise on the Stability of a Given State of Motion. London: Macmillan, 1877. Rpt. in Stability of Motion, Ed. A. T. Fuller. London: Taylor & Francis, 1975
- Felix Gantmacher (J.L. Brenner translator) (1959) Applications of the Theory of Matrices, pp 177–80, New York: Interscience.

.jpg)
.svg)