湍流 氣體速度場的大渦模擬。大渦模擬 (Large eddy simulation, LES ) 是用於計算流體動力學 的湍流 數學模型。它最初由約瑟夫·斯瑪格林斯基於 1963 年提出,用於模擬大氣氣流, [ 1] [ 2] 燃燒 、 [ 3] [ 4] [ 5]
通過數值求解Navier-Stokes 方程 來模擬湍流需要解決非常廣泛的時間和長度尺度,所有這些都會影響流場。這樣的分辨率可以通過直接數值模擬(DNS) 來實現,但 DNS 的計算成本很高,難以模擬具有複雜幾何形狀或流動配置的實際工程系統,例如湍流噴射、泵、車輛和起落架。
LES 背後的主要思想是通過 Navier-Stokes 方程的低通濾波 忽略最小長度尺度來降低計算成本。這種可以被視為時間和空間平均的低通濾波,有效地從數值解中去除了小尺度信息。然而,這些信息並不是無關緊要的,它對流場的影響必須被建模,由此衍生小尺度可以發揮重要作用的問題的活躍研究領域,例如近壁流, [ 6] [ 7] [ 3] [ 8]
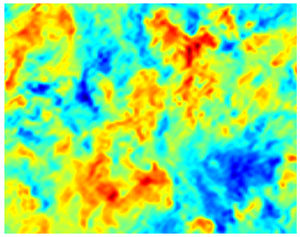
由均勻衰減湍流的直接數值模擬(DNS) 產生的速度場。域大小為
L
3
{\displaystyle L^{3}}
使用盒式過濾器過濾的相同 DNS 速度字段和
Δ
=
L
/
32
{\displaystyle \Delta =L/32}
使用盒式過濾器過濾的相同 DNS 速度字段和
Δ
=
L
/
16
{\displaystyle \Delta =L/16}
LES 濾波器可應用於空間和時間場
ϕ
(
x
,
t
)
{\displaystyle \phi ({\boldsymbol {x}},t)}
[ 9] [ 10]
ϕ
(
x
,
t
)
¯
=
∫
−
∞
∞
∫
−
∞
∞
ϕ
(
r
,
τ
)
G
(
x
−
r
,
t
−
τ
)
d
τ
d
r
{\displaystyle {\overline {\phi ({\boldsymbol {x}},t)}}=\displaystyle {\int _{-\infty }^{\infty }}\int _{-\infty }^{\infty }\phi ({\boldsymbol {r}},\tau )G({\boldsymbol {x}}-{\boldsymbol {r}},t-\tau )d\tau d{\boldsymbol {r}}}
其中
G
{\displaystyle G}
ϕ
¯
=
G
⋆
ϕ
.
{\displaystyle {\overline {\phi }}=G\star \phi .}
過濾器內核
G
{\displaystyle G}
Δ
{\displaystyle \Delta }
τ
c
{\displaystyle \tau _{c}}
ϕ
{\displaystyle \phi }
ϕ
=
ϕ
¯
+
ϕ
′
.
{\displaystyle \phi ={\bar {\phi }}+\phi ^{\prime }.}
需要注意的是,大渦模擬濾波操作不滿足雷諾算子的性質。
LES的控制方程是通過過濾控制流場的偏微分方程 得到的
ρ
u
(
x
,
t
)
{\displaystyle \rho {\boldsymbol {u}}({\boldsymbol {x}},t)}
對於不可壓縮流動,對連續性方程 和 Navier-Stokes 方程進行濾波,得到濾波後的不可壓縮連續性方程,
∂
u
i
¯
∂
x
i
=
0
{\displaystyle {\frac {\partial {\bar {u_{i}}}}{\partial x_{i}}}=0}
和過濾後的 Navier-Stokes 方程,
∂
u
i
¯
∂
t
+
∂
∂
x
j
(
u
i
u
j
¯
)
=
−
1
ρ
∂
p
¯
∂
x
i
+
ν
∂
∂
x
j
(
∂
u
i
¯
∂
x
j
+
∂
u
j
¯
∂
x
i
)
=
−
1
ρ
∂
p
¯
∂
x
i
+
2
ν
∂
∂
x
j
S
¯
i
j
,
{\displaystyle {\frac {\partial {\bar {u_{i}}}}{\partial t}}+{\frac {\partial }{\partial x_{j}}}\left({\overline {u_{i}u_{j}}}\right)=-{\frac {1}{\rho }}{\frac {\partial {\overline {p}}}{\partial x_{i}}}+\nu {\frac {\partial }{\partial x_{j}}}\left({\frac {\partial {\bar {u_{i}}}}{\partial x_{j}}}+{\frac {\partial {\bar {u_{j}}}}{\partial x_{i}}}\right)=-{\frac {1}{\rho }}{\frac {\partial {\overline {p}}}{\partial x_{i}}}+2\nu {\frac {\partial }{\partial x_{j}}}{\bar {S}}_{ij},}
其中
p
¯
{\displaystyle {\bar {p}}}
S
¯
i
j
{\displaystyle {\bar {S}}_{ij}}
非線性 濾波平流項
u
i
u
j
¯
{\displaystyle {\overline {u_{i}u_{j}}}}
過濾後的平流項可以按照萊昂納德(1975)[ 11]
u
i
u
j
¯
=
τ
i
j
+
u
¯
i
u
¯
j
{\displaystyle {\overline {u_{i}u_{j}}}=\tau _{ij}+{\overline {u}}_{i}{\overline {u}}_{j}}
其中
τ
i
j
{\displaystyle \tau _{ij}}
∂
u
i
¯
∂
t
+
∂
∂
x
j
(
u
¯
i
u
¯
j
)
=
−
1
ρ
∂
p
¯
∂
x
i
+
2
ν
∂
∂
x
j
S
¯
i
j
−
∂
τ
i
j
∂
x
j
{\displaystyle {\frac {\partial {\bar {u_{i}}}}{\partial t}}+{\frac {\partial }{\partial x_{j}}}\left({\overline {u}}_{i}{\overline {u}}_{j}\right)=-{\frac {1}{\rho }}{\frac {\partial {\overline {p}}}{\partial x_{i}}}+2\nu {\frac {\partial }{\partial x_{j}}}{\bar {S}}_{ij}-{\frac {\partial \tau _{ij}}{\partial x_{j}}}}
τ
i
j
{\displaystyle \tau _{ij}}
τ
i
j
=
L
i
j
+
C
i
j
+
R
i
j
{\displaystyle \tau _{ij}=L_{ij}+C_{ij}+R_{ij}}
L
i
j
=
u
¯
i
u
¯
j
¯
−
u
¯
i
u
¯
j
{\displaystyle L_{ij}={\overline {{\bar {u}}_{i}{\bar {u}}_{j}}}-{\bar {u}}_{i}{\bar {u}}_{j}}
R
i
j
=
u
i
′
u
j
′
¯
{\displaystyle R_{ij}={\overline {u_{i}^{\prime }u_{j}^{\prime }}}}
C
i
j
=
u
¯
i
u
j
′
¯
+
u
¯
j
u
i
′
¯
{\displaystyle C_{ij}={\overline {{\bar {u}}_{i}u_{j}^{\prime }}}+{\overline {{\bar {u}}_{j}u_{i}^{\prime }}}}
[ 12] [ 11]
τ
i
j
{\displaystyle \tau _{ij}}
τ
i
j
{\displaystyle \tau _{ij}}
被動標量
ϕ
{\displaystyle \phi }
∂
ϕ
¯
∂
t
+
∂
∂
x
j
(
u
¯
j
ϕ
¯
)
=
∂
J
ϕ
¯
∂
x
j
+
∂
q
j
∂
x
j
{\displaystyle {\frac {\partial {\overline {\phi }}}{\partial t}}+{\frac {\partial }{\partial x_{j}}}\left({\overline {u}}_{j}{\overline {\phi }}\right)={\frac {\partial {\overline {J_{\phi }}}}{\partial x_{j}}}+{\frac {\partial q_{j}}{\partial x_{j}}}}
其中
J
ϕ
{\displaystyle J_{\phi }}
ϕ
{\displaystyle \phi }
q
j
{\displaystyle q_{j}}
ϕ
{\displaystyle \phi }
J
ϕ
¯
{\displaystyle {\overline {J_{\phi }}}}
J
ϕ
=
D
ϕ
∂
ϕ
∂
x
i
{\displaystyle J_{\phi }=D_{\phi }{\frac {\partial \phi }{\partial x_{i}}}}
q
j
{\displaystyle q_{j}}
τ
i
j
{\displaystyle \tau _{ij}}
q
j
=
ϕ
¯
u
¯
j
−
ϕ
u
j
¯
{\displaystyle q_{j}={\bar {\phi }}{\overline {u}}_{j}-{\overline {\phi u_{j}}}}
並且可以類似地分解為各種尺度之間相互作用的貢獻。這種子過濾器通量也需要子過濾器模型。
使用愛因斯坦求和約定 ,笛卡爾坐標中不可壓縮流體的 Navier-Stokes 方程為
∂
u
i
∂
x
i
=
0
{\displaystyle {\frac {\partial u_{i}}{\partial x_{i}}}=0}
∂
u
i
∂
t
+
∂
u
i
u
j
∂
x
j
=
−
1
ρ
∂
p
∂
x
i
+
ν
∂
2
u
i
∂
x
j
∂
x
j
.
{\displaystyle {\frac {\partial u_{i}}{\partial t}}+{\frac {\partial u_{i}u_{j}}{\partial x_{j}}}=-{\frac {1}{\rho }}{\frac {\partial p}{\partial x_{i}}}+\nu {\frac {\partial ^{2}u_{i}}{\partial x_{j}\partial x_{j}}}.}
過濾動量方程導致
∂
u
i
∂
t
¯
+
∂
u
i
u
j
∂
x
j
¯
=
−
1
ρ
∂
p
∂
x
i
¯
+
ν
∂
2
u
i
∂
x
j
∂
x
j
¯
.
{\displaystyle {\overline {\frac {\partial u_{i}}{\partial t}}}+{\overline {\frac {\partial u_{i}u_{j}}{\partial x_{j}}}}=-{\overline {{\frac {1}{\rho }}{\frac {\partial p}{\partial x_{i}}}}}+{\overline {\nu {\frac {\partial ^{2}u_{i}}{\partial x_{j}\partial x_{j}}}}}.}
如果我們假設過濾和微分對等,那麼
∂
u
i
¯
∂
t
+
∂
u
i
u
j
∂
x
j
¯
=
−
1
ρ
∂
p
¯
∂
x
i
+
ν
∂
2
u
i
¯
∂
x
j
∂
x
j
.
{\displaystyle {\frac {\partial {\bar {u_{i}}}}{\partial t}}+{\overline {\frac {\partial u_{i}u_{j}}{\partial x_{j}}}}=-{\frac {1}{\rho }}{\frac {\partial {\bar {p}}}{\partial x_{i}}}+\nu {\frac {\partial ^{2}{\bar {u_{i}}}}{\partial x_{j}\partial x_{j}}}.}
這個方程模擬了過濾變量的時間變化
u
i
¯
{\displaystyle {\bar {u_{i}}}}
u
i
{\displaystyle u_{i}}
∂
u
i
u
j
∂
x
j
¯
{\displaystyle {\overline {\frac {\partial u_{i}u_{j}}{\partial x_{j}}}}}
∂
u
i
¯
u
j
¯
∂
x
j
{\displaystyle {\frac {\partial {\bar {u_{i}}}{\bar {u_{j}}}}{\partial x_{j}}}}
∂
u
i
¯
∂
t
+
∂
u
i
¯
u
j
¯
∂
x
j
=
−
1
ρ
∂
p
¯
∂
x
i
+
ν
∂
2
u
i
¯
∂
x
j
∂
x
j
−
(
∂
u
i
u
j
∂
x
j
¯
−
∂
u
i
¯
u
j
¯
∂
x
j
)
.
{\displaystyle {\frac {\partial {\bar {u_{i}}}}{\partial t}}+{\frac {\partial {\bar {u_{i}}}{\bar {u_{j}}}}{\partial x_{j}}}=-{\frac {1}{\rho }}{\frac {\partial {\bar {p}}}{\partial x_{i}}}+\nu {\frac {\partial ^{2}{\bar {u_{i}}}}{\partial x_{j}\partial x_{j}}}-\left({\overline {\frac {\partial u_{i}u_{j}}{\partial x_{j}}}}-{\frac {\partial {\bar {u_{i}}}{\bar {u_{j}}}}{\partial x_{j}}}\right).}
令
τ
i
j
=
u
i
u
j
¯
−
u
¯
i
u
¯
j
{\displaystyle \tau _{ij}={\overline {u_{i}u_{j}}}-{\bar {u}}_{i}{\bar {u}}_{j}}
∂
u
i
¯
∂
t
+
u
j
¯
∂
u
i
¯
∂
x
j
=
−
1
ρ
∂
p
¯
∂
x
i
+
ν
∂
2
u
i
¯
∂
x
j
∂
x
j
−
∂
τ
i
j
∂
x
j
.
{\displaystyle {\frac {\partial {\bar {u_{i}}}}{\partial t}}+{\bar {u_{j}}}{\frac {\partial {\bar {u_{i}}}}{\partial x_{j}}}=-{\frac {1}{\rho }}{\frac {\partial {\bar {p}}}{\partial x_{i}}}+\nu {\frac {\partial ^{2}{\bar {u_{i}}}}{\partial x_{j}\partial x_{j}}}-{\frac {\partial \tau _{ij}}{\partial x_{j}}}.}
對於可壓縮流動的控制方程,每個方程都從質量守恆開始過濾。這給出了:
∂
ρ
¯
∂
t
+
∂
u
i
ρ
¯
∂
x
i
=
0
{\displaystyle {\frac {\partial {\overline {\rho }}}{\partial t}}+{\frac {\partial {\overline {u_{i}\rho }}}{\partial x_{i}}}=0}
這導致了一個額外的子過濾器項。然而,希望避免必須對質量守恆方程的子過濾器尺度進行建模。出於這個原因,Favre [ 13]
ϕ
{\displaystyle \phi }
ϕ
~
=
ρ
ϕ
¯
ρ
¯
{\displaystyle {\tilde {\phi }}={\frac {\overline {\rho \phi }}{\overline {\rho }}}}
在不可壓縮的限制下,它變成了正常的過濾操作。這使得質量守恆方程化為:
∂
ρ
¯
∂
t
+
∂
ρ
¯
u
i
~
∂
x
i
=
0.
{\displaystyle {\frac {\partial {\overline {\rho }}}{\partial t}}+{\frac {\partial {\overline {\rho }}{\tilde {u_{i}}}}{\partial x_{i}}}=0.}
然後可以將此概念擴展到編寫可壓縮流的 Favre 過濾動量方程。根據弗雷曼: [ 14]
∂
ρ
¯
u
i
~
∂
t
+
∂
ρ
¯
u
i
~
u
j
~
∂
x
j
+
∂
p
¯
∂
x
i
−
∂
σ
~
i
j
∂
x
j
=
−
∂
ρ
¯
τ
i
j
r
∂
x
j
+
∂
∂
x
j
(
σ
¯
i
j
−
σ
~
i
j
)
{\displaystyle {\frac {\partial {\overline {\rho }}{\tilde {u_{i}}}}{\partial t}}+{\frac {\partial {\overline {\rho }}{\tilde {u_{i}}}{\tilde {u_{j}}}}{\partial x_{j}}}+{\frac {\partial {\overline {p}}}{\partial x_{i}}}-{\frac {\partial {\tilde {\sigma }}_{ij}}{\partial x_{j}}}=-{\frac {\partial {\overline {\rho }}\tau _{ij}^{r}}{\partial x_{j}}}+{\frac {\partial }{\partial x_{j}}}\left({\overline {\sigma }}_{ij}-{\tilde {\sigma }}_{ij}\right)}
其中
σ
i
j
{\displaystyle \sigma _{ij}}
σ
i
j
=
2
μ
(
T
)
S
i
j
−
2
3
μ
(
T
)
δ
i
j
S
k
k
{\displaystyle \sigma _{ij}=2\mu (T)S_{ij}-{\frac {2}{3}}\mu (T)\delta _{ij}S_{kk}}
∂
∂
x
j
(
σ
¯
i
j
−
σ
~
i
j
)
{\displaystyle {\frac {\partial }{\partial x_{j}}}\left({\overline {\sigma }}_{ij}-{\tilde {\sigma }}_{ij}\right)}
μ
(
T
)
{\displaystyle \mu (T)}
T
~
{\displaystyle {\tilde {T}}}
τ
i
j
r
=
u
i
⋅
u
j
~
−
u
i
~
u
j
~
{\displaystyle \tau _{ij}^{r}={\widetilde {u_{i}\cdot u_{j}}}-{\tilde {u_{i}}}{\tilde {u_{j}}}}
以此類推,萊昂納德分解也可以寫成濾波三重積的殘餘應力張量
ρ
ϕ
ψ
¯
{\displaystyle {\overline {\rho \phi \psi }}}
ρ
¯
ϕ
ψ
~
{\displaystyle {\overline {\rho }}{\widetilde {\phi \psi }}}
ϕ
{\displaystyle \phi }
ψ
{\displaystyle \psi }
ϕ
~
{\displaystyle {\tilde {\phi }}}
ψ
~
{\displaystyle {\tilde {\psi }}}
u
i
u
j
¯
{\displaystyle {\overline {u_{i}u_{j}}}}
ρ
¯
(
ϕ
ψ
~
−
ϕ
~
ψ
~
)
{\displaystyle {\overline {\rho }}\left({\widetilde {\phi \psi }}-{\tilde {\phi }}{\tilde {\psi }}\right)}
L
i
j
{\displaystyle L_{ij}}
C
i
j
{\displaystyle C_{ij}}
R
i
j
{\displaystyle R_{ij}}
[ 15]
除了過濾的質量和動量方程之外,過濾動能方程可以提供額外的見解。可以過濾動能場以產生總過濾動能:
E
¯
=
1
2
u
i
u
i
¯
{\displaystyle {\overline {E}}={\frac {1}{2}}{\overline {u_{i}u_{i}}}}
過濾後的總動能可以分解為兩項:過濾後的速度場的動能
E
f
{\displaystyle E_{f}}
E
f
=
1
2
u
i
¯
u
i
¯
{\displaystyle E_{f}={\frac {1}{2}}{\overline {u_{i}}}\,{\overline {u_{i}}}}
和剩餘動能
k
r
{\displaystyle k_{r}}
k
r
=
1
2
u
i
u
i
¯
−
1
2
u
i
¯
u
i
¯
=
1
2
τ
i
i
r
{\displaystyle k_{r}={\frac {1}{2}}{\overline {u_{i}u_{i}}}-{\frac {1}{2}}{\overline {u_{i}}}\,{\overline {u_{i}}}={\frac {1}{2}}\tau _{ii}^{r}}
這樣
E
¯
=
E
f
+
k
r
{\displaystyle {\overline {E}}=E_{f}+k_{r}}
守恆方程為
E
f
{\displaystyle E_{f}}
u
i
¯
{\displaystyle {\overline {u_{i}}}}
∂
E
f
∂
t
+
u
j
¯
∂
E
f
∂
x
j
+
1
ρ
∂
u
i
¯
p
¯
∂
x
i
+
∂
u
i
¯
τ
i
j
r
∂
x
j
−
2
ν
∂
u
i
¯
S
i
j
¯
∂
x
j
=
−
ϵ
f
−
Π
{\displaystyle {\frac {\partial E_{f}}{\partial t}}+{\overline {u_{j}}}{\frac {\partial E_{f}}{\partial x_{j}}}+{\frac {1}{\rho }}{\frac {\partial {\overline {u_{i}}}{\bar {p}}}{\partial x_{i}}}+{\frac {\partial {\overline {u_{i}}}\tau _{ij}^{r}}{\partial x_{j}}}-2\nu {\frac {\partial {\overline {u_{i}}}{\bar {S_{ij}}}}{\partial x_{j}}}=-\epsilon _{f}-\Pi }
其中
ϵ
f
=
2
ν
S
i
j
¯
S
i
j
¯
{\displaystyle \epsilon _{f}=2\nu {\bar {S_{ij}}}{\bar {S_{ij}}}}
Π
=
−
τ
i
j
r
S
i
j
¯
{\displaystyle \Pi =-\tau _{ij}^{r}{\bar {S_{ij}}}}
左邊的項代表運輸,右邊的項是耗散動能的匯項。 [ 9]
Π
{\displaystyle \Pi }
Π
{\displaystyle \Pi }
Π
{\displaystyle \Pi }
或 消極的,這意味着它也可以作為源項
E
f
{\displaystyle E_{f}}
反向散射 (同樣,能量從已解析到未解析尺度的傳遞稱為前向散射 )。 [ 16]
大渦模擬涉及使用計算流體動力學 求解離散濾波控制方程。 LES 從域大小中解析尺度
L
{\displaystyle L}
Δ
{\displaystyle \Delta }
[ 9]
Δ
x
{\displaystyle \Delta x}
u
¯
(
x
)
{\displaystyle {\overline {u}}({\boldsymbol {x}})}
[ 17]
Δ
{\displaystyle \Delta }
Δ
x
{\displaystyle \Delta x}
[ 18]
大渦模擬中的濾波操作可以是隱式的,也可以是顯式的。隱式過濾認識到子過濾器比例模型將以與許多數值方案相同的方式消散。通過這種方式,可以假設網格或數值離散化方案是 LES 低通濾波器。雖然這充分利用了網格分辨率,並消除了計算子濾波器比例模型項的計算成本,但很難確定與一些數值問題相關的 LES 濾波器的形狀。此外,截斷誤差也可能成為問題。 [ 19]
在顯式濾波中, LES 濾波器應用於離散的 Navier-Stokes 方程,提供明確定義的濾波器形狀並減少截斷誤差。然而,顯式過濾比隱式過濾需要更精細的網格,並且計算量與
(
Δ
x
)
4
{\displaystyle (\Delta x)^{4}}
[ 10]
入口邊界條件對LES的精度影響很大,對於LES入口條件的處理是一個複雜的問題。理論上,一個良好的 LES 邊界條件應包含以下特徵: [ 20]
(1) 提供準確的流動特性信息,即速度和湍流;
(2) 滿足 Navier-Stokes 方程和其他物理;
(3)易於實施和適應不同情況。
目前,為 LES 生成入口條件的方法大致分為 Tabor 等人分類的兩類: [ 21]
產生湍流入口的第一種方法是根據具體情況合成它們,例如傅里葉技術、原理正交分解(POD)和渦流方法。合成技術試圖在入口處構建具有合適的類湍流特性的湍流場,並使其易於指定湍流參數,例如湍流動能和湍流耗散率。此外,使用隨機數生成的入口條件在計算上並不昂貴。然而,該方法存在一個嚴重的缺陷。合成的湍流不滿足由 Navier-Stokes 方程控制的流體流動的物理結構。 [ 20]
第二種方法涉及一個單獨的前體計算,以生成一個湍流數據庫,該數據庫可以引入到入口處的主要計算中。數據庫(有時稱為「庫」)可以通過多種方式生成,例如循環域、預先準備好的庫和內部映射。然而,前驅體模擬產生湍流流入的方法需要很大的計算能力。
研究人員檢查了各種合成和前體計算的應用,發現入口湍流越真實,LES 預測結果就越準確。 [ 20]
為了討論未解析尺度的建模,首先必須對未解析尺度進行分類。它們分為兩組:已解決的子過濾器尺度 (SFS) 和子網格尺度 (SGS)。
解析的子濾波器尺度表示波數大於截止波數的尺度
k
c
{\displaystyle k_{c}}
子網格比例是小於截止濾波器寬度
Δ
{\displaystyle \Delta }
如果沒有普遍有效的湍流描述,則在構建和應用 SGS 模型時必須利用經驗信息,並輔以伽利略不變性[ 9] [ 22] 功能模型 ,第二類是結構模型 。一些模型可能被歸類為兩者。
功能模型比結構模型更簡單,只關注以物理上正確的速率耗散能量。這些基於人工渦流粘度方法,其中湍流的影響集中在湍流粘度中。該方法將亞網格尺度上的動能耗散視為類似於分子擴散。在這種情況下,偏斜部分
τ
i
j
{\displaystyle \tau _{ij}}
τ
i
j
r
−
1
3
τ
k
k
δ
i
j
=
−
2
ν
t
S
¯
i
j
{\displaystyle \tau _{ij}^{r}-{\frac {1}{3}}\tau _{kk}\delta _{ij}=-2\nu _{\mathrm {t} }{\bar {S}}_{ij}}
其中
ν
t
{\displaystyle \nu _{\mathrm {t} }}
S
¯
i
j
=
1
2
(
∂
u
¯
i
∂
x
j
+
∂
u
¯
j
∂
x
i
)
{\displaystyle {\bar {S}}_{ij}={\frac {1}{2}}\left({\frac {\partial {\bar {u}}_{i}}{\partial x_{j}}}+{\frac {\partial {\bar {u}}_{j}}{\partial x_{i}}}\right)}
根據量綱分析,渦流粘度的單位必須為
[
ν
t
]
=
m
2
s
{\displaystyle \left[\nu _{\mathrm {t} }\right]={\frac {\mathrm {m^{2}} }{\mathrm {s} }}}
第一個成功開發的 SGS 模型是 Smagorinsky-Lilly SGS 模型,它由Smagorinsky [ 1] [ 2]
ν
t
=
C
Δ
2
2
S
¯
i
j
S
¯
i
j
=
C
Δ
2
|
S
¯
|
{\displaystyle \nu _{\mathrm {t} }=C\Delta ^{2}{\sqrt {2{\bar {S}}_{ij}{\bar {S}}_{ij}}}=C\Delta ^{2}\left|{\bar {S}}\right|}
其中
Δ
{\displaystyle \Delta }
C
{\displaystyle C}
該方法假設小尺度的能量產生和耗散處於平衡狀態——即,
ϵ
=
Π
{\displaystyle \epsilon =\Pi }
Germano 等 [ 23]
C
{\displaystyle C}
f
¯
{\displaystyle {\overline {f}}}
f
^
{\displaystyle {\hat {f}}}
f
{\displaystyle f}
τ
i
j
=
u
i
u
j
¯
−
u
¯
i
u
¯
j
{\displaystyle \tau _{ij}={\overline {u_{i}u_{j}}}-{\bar {u}}_{i}{\bar {u}}_{j}}
T
i
j
=
u
i
u
j
¯
^
−
u
¯
^
i
u
¯
^
j
{\displaystyle T_{ij}={\widehat {\overline {u_{i}u_{j}}}}-{\hat {\bar {u}}}_{i}{\hat {\bar {u}}}_{j}}
L
i
j
=
T
i
j
−
τ
^
i
j
.
{\displaystyle L_{ij}=T_{ij}-{\hat {\tau }}_{ij}.}
這裡
L
i
j
=
u
¯
i
u
¯
j
^
−
u
¯
i
^
u
¯
j
^
{\displaystyle L_{ij}={\widehat {{\bar {u}}_{i}{\bar {u}}_{j}}}-{\widehat {{\bar {u}}_{i}}}{\widehat {{\bar {u}}_{j}}}}
τ
i
j
−
(
τ
k
k
/
3
)
δ
i
j
=
−
2
C
Δ
2
|
S
¯
i
j
|
S
¯
i
j
{\displaystyle \tau _{ij}-(\tau _{kk}/3)\delta _{ij}=-2C\Delta ^{2}|{\bar {S}}_{ij}|{\bar {S}}_{ij}}
T
i
j
−
(
T
k
k
/
3
)
δ
i
j
=
−
2
C
Δ
^
2
|
S
¯
^
i
j
|
S
¯
^
i
j
{\displaystyle T_{ij}-(T_{kk}/3)\delta _{ij}=-2C{\hat {\Delta }}^{2}|{\hat {\bar {S}}}_{ij}|{\hat {\bar {S}}}_{ij}}
C
{\displaystyle C}
為了做到這一點,需要在原始推導中引入x兩個額外的步驟。首先,假設即使
C
{\displaystyle C}
C
(
.
)
^
=
C
(
.
)
^
{\displaystyle {\widehat {C(.)}}=C{\widehat {(.)}}}
C
{\displaystyle C}
C
{\displaystyle C}
[ 24]
C
{\displaystyle C}
C
{\displaystyle C}
C
{\displaystyle C}
C
{\displaystyle C}
C
=
L
i
j
m
i
j
m
k
l
m
k
l
.
{\displaystyle C={\frac {L_{ij}m_{ij}}{m_{kl}m_{kl}}}.}
其中
m
i
j
=
α
i
j
−
β
^
i
j
{\displaystyle m_{ij}=\alpha _{ij}-{\widehat {\beta }}_{ij}}
α
i
j
=
−
2
Δ
^
2
|
S
¯
^
|
S
¯
^
i
j
{\displaystyle \alpha _{ij}=-2{\hat {\Delta }}^{2}|{\hat {\bar {S}}}|{\hat {\bar {S}}}_{ij}}
β
i
j
=
−
2
Δ
2
|
S
¯
|
S
¯
i
j
{\displaystyle \beta _{ij}=-2\Delta ^{2}|{\bar {S}}|{\bar {S}}_{ij}}
C
{\displaystyle C}
−
τ
i
j
S
¯
i
j
{\displaystyle -\tau _{ij}{\bar {S}}_{ij}}
C
=
⟨
L
i
j
m
i
j
⟩
⟨
m
k
l
m
k
l
⟩
.
{\displaystyle C={\frac {\left\langle L_{ij}m_{ij}\right\rangle }{\left\langle m_{kl}m_{kl}\right\rangle }}.}
當平均涉及足夠大的統計樣本時,計算
C
{\displaystyle C}
[ 25]
Lilly 對 Germano 方法的修改,然後是統計平均或綜合去除負粘度區域似乎是臨時的,即使它可以「工作」。 Ghosal 等人提出了一種稱為「動態定位模型」(DLM)的最小二乘最小化過程的替代公式。 [ 26]
E
i
j
=
L
i
j
−
T
i
j
+
τ
^
i
j
{\displaystyle E_{ij}=L_{ij}-T_{ij}+{\hat {\tau }}_{ij}}
張量
τ
i
j
{\displaystyle \tau _{ij}}
T
i
j
{\displaystyle T_{ij}}
C
{\displaystyle C}
C
(
.
)
^
=
C
(
.
)
^
{\displaystyle {\widehat {C(.)}}=C{\widehat {(.)}}}
使得
E
i
j
{\displaystyle E_{ij}}
C
{\displaystyle C}
E
i
j
E
i
j
{\displaystyle E_{ij}E_{ij}}
C
{\displaystyle C}
C
{\displaystyle C}
C
{\displaystyle C}
C
{\displaystyle C}
E
[
C
]
=
∫
E
i
j
E
i
j
d
V
{\displaystyle E[C]=\int E_{ij}E_{ij}dV}
其中積分範圍在整個流體體積上。這個全局誤差
E
[
C
(
x
,
y
,
z
,
t
)
]
{\displaystyle E[C(x,y,z,t)]}
C
(
x
,
y
,
z
,
t
)
{\displaystyle C(x,y,z,t)}
t
{\displaystyle t}
C
{\displaystyle C}
C
{\displaystyle C}
C
(
x
)
=
f
(
x
)
+
∫
K
(
x
,
y
)
C
(
y
)
d
y
{\displaystyle C({\boldsymbol {x}})=f({\boldsymbol {x}})+\int K({\boldsymbol {x}},{\boldsymbol {y}})C({\boldsymbol {y}})d{\boldsymbol {y}}}
其中函數
K
(
x
,
y
)
{\displaystyle K({\boldsymbol {x}},{\boldsymbol {y}})}
f
(
x
)
{\displaystyle f({\boldsymbol {x}})}
L
i
j
,
α
i
j
,
β
i
j
{\displaystyle L_{ij},\alpha _{ij},\beta _{ij}}
C
(
x
,
y
,
z
,
t
)
{\displaystyle C(x,y,z,t)}
E
[
C
]
{\displaystyle E[C]}
C
(
x
,
y
,
z
,
t
)
≥
0
{\displaystyle C(x,y,z,t)\geq 0}
C
{\displaystyle C}
C
(
x
)
=
[
f
(
x
)
+
∫
K
(
x
,
y
)
C
(
y
)
d
y
]
+
{\displaystyle C({\boldsymbol {x}})=\left[f({\boldsymbol {x}})+\int K({\boldsymbol {x}},{\boldsymbol {y}})C({\boldsymbol {y}})d{\boldsymbol {y}}\right]_{+}}
這裡後綴 + 表示「正數部分」,即,
x
+
=
(
x
+
|
x
|
)
/
2
{\displaystyle x_{+}=(x+|x|)/2}
C
=
C
(
y
,
t
)
{\displaystyle C=C(y,t)}
DLM(+) 模型的一個缺點是它沒有描述反向散射,而反向散射在分析 DNS 數據時被認為是真實的「事物」。開發了兩種方法來解決這個問題。由於 Carati 等人的一種方法。 [ 27]
Δ
|
S
¯
|
{\displaystyle \Delta |{\bar {S}}|}
k
{\displaystyle {\sqrt {k}}}
C
{\displaystyle C}
α
i
j
=
−
2
Δ
^
K
S
¯
^
i
j
{\displaystyle \alpha _{ij}=-2{\hat {\Delta }}{\sqrt {K}}{\hat {\bar {S}}}_{ij}}
β
i
j
=
−
2
Δ
^
k
S
¯
i
j
{\displaystyle \beta _{ij}=-2{\hat {\Delta }}{\sqrt {k}}{\bar {S}}_{ij}}
K
=
k
+
L
i
i
/
2
{\displaystyle K=k+L_{ii}/2}
∂
k
∂
t
+
u
j
∂
k
∂
x
j
=
−
τ
i
j
S
¯
i
j
−
C
∗
Δ
k
3
/
2
+
∂
∂
x
j
(
D
Δ
k
∂
k
∂
x
j
)
+
ν
∂
2
k
∂
x
j
∂
x
j
{\displaystyle {\frac {\partial k}{\partial t}}+u_{j}{\frac {\partial k}{\partial x_{j}}}=-\tau _{ij}{\bar {S}}_{ij}-{\frac {C_{*}}{\Delta }}k^{3/2}+{\frac {\partial }{\partial x_{j}}}\left(D\Delta {\sqrt {k}}{\frac {\partial k}{\partial x_{j}}}\right)+\nu {\frac {\partial ^{2}k}{\partial x_{j}\partial x_{j}}}}
其中
ν
{\displaystyle \nu }
C
∗
,
D
{\displaystyle C_{*},D}
動態模型起源於 1990 年斯坦福大學 湍流研究中心(CTR) 的暑期項目 (頁面存檔備份 ,存於網際網路檔案館 )。一系列「CTR-Tea」研討會慶祝了湍流建模這一重要里程碑的30 周年 (頁面存檔備份 ,存於網際網路檔案館 )。
^ 1.0 1.1 Smagorinsky, Joseph. General Circulation Experiments with the Primitive Equations . Monthly Weather Review. March 1963, 91 (3): 99–164. Bibcode:1963MWRv...91...99S doi:10.1175/1520-0493(1963)091<0099:GCEWTP>2.3.CO;2 ^ 2.0 2.1 Deardorff, James. A numerical study of three-dimensional turbulent channel flow at large Reynolds numbers. Journal of Fluid Mechanics . 1970, 41 (2): 453–480. Bibcode:1970JFM....41..453D S2CID 121884175 doi:10.1017/S0022112070000691 ^ 3.0 3.1 Pitsch, Heinz. Large-Eddy Simulation of Turbulent Combustion (PDF) . Annual Review of Fluid Mechanics. 2006, 38 (1): 453–482 [2022-10-25 ] . Bibcode:2006AnRFM..38..453P S2CID 5487815 doi:10.1146/annurev.fluid.38.050304.092133 存檔 (PDF) 於2023-03-07). ^ Wagner, Claus; Hüttl, Thomas; Sagaut, Pierre. Large-Eddy Simulation for Acoustics. Cambridge University Press. 2007. ISBN 978-0-521-87144-0 ^ Sullivan, Peter P.; McWilliams, James C.; Moeng, Chin-Hoh. A subgrid-scale model for large-eddy simulation of planetary boundary-layer flows. Boundary-Layer Meteorology. 1994, 71 (3): 247–276. Bibcode:1994BoLMe..71..247S CiteSeerX 10.1.1.463.6006 ISSN 0006-8314 S2CID 53051046 doi:10.1007/BF00713741 ^ Piomelli, Ugo; Elias Balaras. Wall-layer models for large-eddy simulations.. Annual Review of Fluid Mechanics. 2002, 34 (34): 349–374. Bibcode:2002AnRFM..34..349P doi:10.1146/annurev.fluid.34.082901.144919 ^ Spalart, P. R. Detached-eddy simulation.. Annual Review of Fluid Mechanics. 2009, 41 (1): 181–202. Bibcode:2009AnRFM..41..181S doi:10.1146/annurev.fluid.010908.165130 ^ Fox, R. O. Large-eddy-simulation tools for multiphase flows.. Annual Review of Fluid Mechanics. 2012, 44 (1): 47–76. Bibcode:2012AnRFM..44...47F doi:10.1146/annurev-fluid-120710-101118 ^ 9.0 9.1 9.2 9.3 Pope, S. B. Turbulent Flows. Cambridge University Press. 2000. ^ 10.0 10.1 Sagaut, Pierre. Large Eddy Simulation for Incompressible Flows Third. Springer. 2006. ISBN 978-3-540-26344-9 ^ 11.0 11.1 Leonard, A. Energy cascade in large-eddy simulations of turbulent fluid flows. Advances in Geophysics A. Advances in Geophysics 18 . 1975: 237–248. Bibcode:1975AdGeo..18..237L ISBN 9780120188185doi:10.1016/S0065-2687(08)60464-1 ^ Clark, R.; Ferziger, J.; Reynolds, W. Evaluation of subgrid-scale models using an accurately simulated turbulent flow. Journal of Fluid Mechanics . 1979, 91 : 1–16. Bibcode:1979JFM....91....1C S2CID 120228458 doi:10.1017/S002211207900001X ^ Favre, Alexandre. Turbulence: space-time statistical properties and behavior in supersonic flows. Physics of Fluids A. 1983, 23 (10): 2851–2863. Bibcode:1983PhFl...26.2851F doi:10.1063/1.864049 ^ Vreman, Bert; Geurts, Bernard; Kuerten, Hans. Subgrid-modelling in LES of compressible flow . Applied Scientific Research . 1995, 45 (3): 191–203. doi:10.1007/BF00849116 ^ Garnier, E.; Adams, N.; Sagaut, P. Large eddy simulation for compressible flows . Springer. 2009. ISBN 978-90-481-2818-1doi:10.1007/978-90-481-2819-8 ^ Piomelli, U.; Cabot, W.; Moin, P. ; Lee, S. Subgrid-scale backscatter in turbulent and transitional flows . Physics of Fluids A. 1991, 3 (7): 1766–1771. Bibcode:1991PhFl....3.1766P S2CID 54904570 doi:10.1063/1.857956 ^ Ghosal, S. An analysis of numerical errors in large-eddy simulations of turbulence. Journal of Computational Physics . April 1996, 125 (1): 187–206. Bibcode:1996JCoPh.125..187G doi:10.1006/jcph.1996.0088 ^ Randall J. Leveque. Numerical Methods for Conservation Laws 2nd. Birkhäuser Basel. 1992. ISBN 978-3-7643-2723-1 ^ Grinstein, Fernando; Margolin, Len; Rider, William. Implicit large eddy simulation . Cambridge University Press. 2007. ISBN 978-0-521-86982-9 ^ 20.0 20.1 20.2 Li, P.; Eckels, S.; Mann, G.; Zhang, N. A Method of Measuring Turbulent Flow Structures With Particle Image Velocimetry and Incorporating Into Boundary Conditions of Large Eddy Simulations. Journal of Fluids Engineering (ASME International). 2018, 140 (7). 071401-071401-11. doi:10.1115/1.4039256 ^ Tabor, G. R.; Baba-Ahmadi, M. H. Inlet conditions for large eddy simulation: a review. Computers & Fluids. 2010, 39 (4): 553–567. doi:10.1016/j.compfluid.2009.10.007 ^ Meneveau, C. Turbulence: Subgrid-Scale Modeling. Scholarpedia. 2010, 5 (1): 9489. Bibcode:2010SchpJ...5.9489M doi:10.4249/scholarpedia.9489 ^ Germano, M.; Piomelli, U.; Moin, P. ; Cabot, W. A dynamic subgrid‐scale eddy viscosity model . Physics of Fluids A . 1991, 3 (7): 1760–1765. Bibcode:1991PhFl....3.1760G S2CID 55719851 doi:10.1063/1.857955 ^ Lilly, D. K. A proposed modification of the Germano subgrid-scale closure method. Physics of Fluids A. 1992, 4 (3): 633–636. Bibcode:1992PhFlA...4..633L doi:10.1063/1.858280 ^ Meneveau, C.; Lund, T. S.; Cabot, W. H. A Lagrangian dynamic subgrid-scale model of turbulence. J. Fluid Mech. 1996, 319 (1): 353–385. Bibcode:1996JFM...319..353M S2CID 122183534 doi:10.1017/S0022112096007379 hdl:2060/19950014634 ^ Ghosal, S.; Lund, T.S.; Moin, P.; Akselvoll, K. A dynamic localization model for large-eddy simulation of turbulent flows. Journal of Fluid Mechanics. 1995, 286 : 229–255. S2CID 124586994 doi:10.1017/S0022112095000711 ^ Carati, D.; Ghosal, S.; Moin, P. On the representation of backscatter in Dynamic Localization models. Physics of Fluids. 1995, 7 (3): 606–616. doi:10.1063/1.868585 


















































































![{\displaystyle \left[\nu _{\mathrm {t} }\right]={\frac {\mathrm {m^{2}} }{\mathrm {s} }}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/184c1fccb884babf37ef4fde3f123842c969d309)






















![{\displaystyle E[C]=\int E_{ij}E_{ij}dV}](https://wikimedia.org/api/rest_v1/media/math/render/svg/37685ef9c3d3b5c67410d4c450a7e4fa2526c695)
![{\displaystyle E[C(x,y,z,t)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/43664d34c18bf678de5159d42a59d37509ec5697)






![{\displaystyle E[C]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/70d52ebec4577f8617d3b2d70ccb501bf65f7797)

![{\displaystyle C({\boldsymbol {x}})=\left[f({\boldsymbol {x}})+\int K({\boldsymbol {x}},{\boldsymbol {y}})C({\boldsymbol {y}})d{\boldsymbol {y}}\right]_{+}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/01fd8d503ee7dbcf432468ad08c669e7f31dd340)










 .
.