|
|
| 第152行: |
第152行: |
|
[[Image:Overshoot control.PNG|thumbnail|300px|图4:α 的三个不同取值的阶跃响应。顶部:α = 4;中间:α = 2;底部:α = 0.5。随着 α 减小,极点分离也会减小,而过冲增加。]] |
|
[[Image:Overshoot control.PNG|thumbnail|300px|图4:α 的三个不同取值的阶跃响应。顶部:α = 4;中间:α = 2;底部:α = 0.5。随着 α 减小,极点分离也会减小,而过冲增加。]] |
|
|
|
|
|
|
{{clear}} |
|
==數學定義== |
|
==數學定義== |
|
|
[[Image:Step response.jpg|right|frame|圖8:一動態系統、其輸入、輸出和其階躍響應的黑箱圖]] |
| ⚫ |
對於一個[[线性时不变系统理论|線性非時變系統]],其階躍響應可以用[[單位階躍函數]]''H''(''t'')和系統[[衝激響應]] ''h''(''t'') 的[[卷積]]來表示: |
|
|
|
本節以抽象概念下的{{le|動態系統 (定義)|Dynamical system (definition)|動態系統}}<math>\scriptstyle\mathfrak{S}</math>,來提供形式性的數學定義。所有符號及假設列在下方。 |
|
|
|
|
|
*<math>\scriptstyle t\in T</math>是系統的{{le|動態系統 (定義)|dynamical system (definition)|演化參數}},為方便說明,簡稱為[[時間]]。 |
| ⚫ |
::<math>a(t) = {h*H}(t) = {H*h}(t) = \int_{-\infty }^{+\infty} h(\tau) H(t - \tau ) \, d\tau = \int_{-\infty}^t h(\tau) \, d\tau.</math> |
|
|
|
*<math>\scriptstyle\boldsymbol{x}|_t\in M</math>是系統在時間<math>t\,</math>時的{{le|動態系統 (定義)|dynamical system (definition)|狀態}},為方便說明,稱為輸出。 |
|
|
*<math>\scriptstyle\Phi:T\times M\longrightarrow M</math>是動態系統的{{le|動態系統 (定義)|dynamical system (definition)|演化函數}}。 |
|
|
*<math>\scriptstyle\Phi(0,\boldsymbol{x})=\boldsymbol{x}_0\in M</math>是動態系統的{{le|動態系統 (定義)|dynamical system (definition)|初始狀態}}。 |
|
|
*<math>\scriptstyle H(t)\,</math>是[[单位阶跃函数]]。 |
|
|
|
|
|
|
=== 非線性動態系統=== |
|
若針對一個一般的動態系統,其階躍響應可定義如下: |
|
若針對一個一般的動態系統,其階躍響應可定義如下: |
|
|
|
|
| 第162行: |
第168行: |
|
|
|
|
|
其階躍響應是系統輸入為單位階躍函數時的演化函數。表示式中''H''(''t'')為下標。 |
|
其階躍響應是系統輸入為單位階躍函數時的演化函數。表示式中''H''(''t'')為下標。 |
|
|
|
|
|
=== 線性動態系統 === |
|
|
對於一個[[线性时不变系统理论|線性非時變系統]],令<math>\scriptstyle\mathfrak{{S}}\ \equiv \ S</math>,,其階躍響應可以用[[單位階躍函數]]''H''(''t'')和系統[[衝激響應]] ''h''(''t'') 的[[卷積]]來表示: |
|
|
|
|
⚫ |
::<math>a(t) = {h*H}(t) = {H*h}(t) = \int_{-\infty }^{+\infty} h(\tau) H(t - \tau ) \, d\tau = \int_{-\infty}^t h(\tau) \, d\tau.</math> |
|
|
|
|
|
對線性非時變系統而言就是將後面的式子積分。相對的,對於線性非時變系統,階躍響應的微分即為衝激響應: |
|
|
|
|
|
:: <math>h(t) = \frac{d}{dt}\, a(t)</math>. |
|
|
|
|
|
不過此關係在非線性系統或是{{le|時變系統|time-variant system}}並不成立<ref name="Shmaliy2007">{{cite book|author=Yuriy Shmaliy|title=Continuous-Time Systems|year=2007|publisher=Springer Science & Business Media|isbn=978-1-4020-6272-8|page=46}}</ref>。 |
|
|
|
|
⚫ |
對於一個[[线性时不变系统理论|線性非時變系統]],其階躍響應可以用[[單位階躍函數]]''H''(''t'')和系統[[衝激響應]] ''h''(''t'') 的[[卷積]]來表示: |
|
|
|
|
|
::<math>a(t) = {h*H}(t) = {H*h}(t) = \int_{-\infty }^{+\infty} h(\tau) H(t - \tau ) \, d\tau = \int_{-\infty}^t h(\tau) \, d\tau.</math> |
|
|
|
|
|
==参考文献与注释== |
|
==参考文献与注释== |
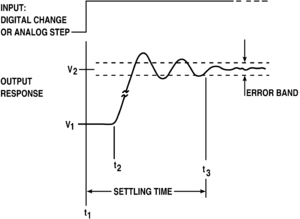 典型二階系統的階躍響應,包括有過衝(overshoot)、振鈴(ringing),在安定時間(settling time)後回到穩定值。
典型二階系統的階躍響應,包括有過衝(overshoot)、振鈴(ringing),在安定時間(settling time)後回到穩定值。
階躍響應是指一系統在其輸入為一階躍函數時,其輸出的變化。在電子工程或控制領域中,階躍響應是指一系統的輸入在很短時間由0變成1時,其輸出的時域特性。此概念可以延伸到使用演化参数的动力系统的抽象的数学概念。
分析一系統的階躍響應有助於了解系統的特性,因為當輸入在長時間穩態後,有快速而大幅度的變化,可以看出系統各個部份的特性。而且也可以知道一個系統的穩定性。
时域与频域
除了频率响应,一系統的階躍響應可以用与时间相关的响应的参数来描述。阶跃响应可以用下列有关它的时域特性的量來描述:
- 过冲(overshoot)。
- 上昇時間(rise time)。
- 安定時間(settling time)。
- 振鈴(ringing)。
对于线性动态系统来说,从这些特征中可以推知许多该系统的信息。
一階線性電路的階躍響應
 RC電路
RC電路
 一階RC電路的階躍響應,沒有過衝及振鈴,在三倍時間常數時輸出到達輸入的95%
一階RC電路的階躍響應,沒有過衝及振鈴,在三倍時間常數時輸出到達輸入的95%
考慮如右圖的RC電路,頻域下輸出電壓Vc和輸入電壓Vin的關係可表示為下式:

其中 為此系統的時間常數
為此系統的時間常數
考慮以下形式的輸入電壓Vin(t):


則輸出電壓Vc(t)可以表示為以下的形式:

反馈放大器的阶跃响应
 图1:理想的负反馈模型;开环增益为 AOL,反馈系数为 β。
图1:理想的负反馈模型;开环增益为 AOL,反馈系数为 β。
本节介绍了一个简单的负反馈放大器的阶跃响应如图1所示。反馈放大器由一个增益为 AOL 的主开环放大器和反馈因子为 β 的反馈回路。以下會分析此回授放大器,確認其阶跃响应和控制響應的時間常數之間的關係,也看阶跃响应和回授量之間的關係。
负反馈放大器增益为(见负反馈放大器):

其中 AOL = 开环增益,AFB = 闭环增益(存在负反馈时的增益),β = 反馈因子.
有一个主导极点
在许多情况下,可以用时间常数 τ 的单一主导极点很好地模拟正向放大器,它的开环增益为:

零频率增益为 A0,角频率 ω = 2πf。这种正向放大器有单位阶跃响应
 ,
,
是从0到新平衡值 A0 的指数趋近。
单极点放大器的传递函数导出闭环增益:
 •
• 
此闭环增益与开环增益是形式相同:均为单极滤波器。其阶跃响应的形式相同:一个趋于新平衡值的指数衰减。但闭环阶跃函数的时间常数为 τ / (1 + β A0),因此因此它比前向放大器的响应快,是其 1 + β A0 倍:
 ,
,
由于反馈因子 β 的增加,阶跃响应会更快,直到最初假设的一个主导极点不再准确。如果有第二个极点,则随着闭环时间常数区域第二个极点的时间常数,需要进行双极点分析。
双极点放大器
在开环增益有两个极点的情况下(两个时间常数,τ1, τ2),阶跃响应更为复杂。开环增益为:

零频率增益为 A0,角频率 ω = 2πf。
分析
双极点放大器的传递函数可以导出闭环增益:
- •

 图2:双极点反馈放大器的共轭极点位置;Re(s) = 实轴,Im(s) = 虚轴。
图2:双极点反馈放大器的共轭极点位置;Re(s) = 实轴,Im(s) = 虚轴。
放大器的时间相关性通过切换变量 s = jω 很容易发现,于是增益变为:
 •
• 
这个表达式的极点(即分母的零点)位于:


这说明对于足够大 βA0 平方根就会变成虚数,极点的位置是共轭复数,s+ 与 s−;参见图2:

其中

而

使用极坐标系,根的半径的模为 |s|(图2):

而角坐标 φ 为:

拉普拉斯变换表告诉我们这样一个系统的时间响应是由两个函数的组合而成的:


也就是说,解在时间上阻尼振荡。特别是,该系统的单位阶跃响应为:[1]

化简为

当 A0 趋于无穷大时,反馈系数 β 为1.
注意到响应的阻尼是由 ρ 确定的,也就是由开环放大器的时间常数确定的。相反,振荡的频率是由 μ 确定的,也就是由, 通过 βA0 由反馈参数确定的。因为 ρ 涉及到时间常数的倒数之和,所以可以发现 ρ 主要受到两个时间常数中较短的那个影响。
结果
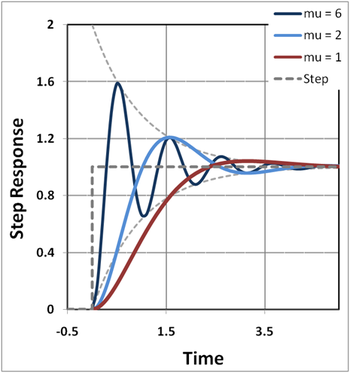 图3:线性双极点反馈放大器的阶跃响应;时间的单位是 1/ρ,也就是以 AOL 的时间常数为变量;曲线是用 mu = μ 的三个不同取值画成的, μ 由 β 控制。
图3:线性双极点反馈放大器的阶跃响应;时间的单位是 1/ρ,也就是以 AOL 的时间常数为变量;曲线是用 mu = μ 的三个不同取值画成的, μ 由 β 控制。
图3显示了参数 μ 取3个不同值时单元阶跃输入的时间响应。可以看出随着 μ 增加,振荡频率也会增加,但振荡被包含在由指数型函数 [ 1 − exp (−ρt) ] 和 [ 1 + exp(−ρt) ] 确定的两条渐近线以内。这两条渐近线是由 ρ 决定的,所以也就由开环放大器的时间常数决定,与反馈无关。
终值的振荡现象被称为振鈴。过冲是指摆动最大值高于终值,显然会随着 μ 增加。同样,下冲是指摆动最小值低于终值,同样也会随着 μ 增加。安定時間是指从终值出发,降到低于某个特定水平(终值的10%)用的时间。
稳定时间对 μ 的依赖性不明显,而双极点系统的近似可能不能达到用稳定时间对反馈的依赖性作出现实中的结论的准确性。但渐近线 [ 1 − exp (−ρt) ] 与 [ 1 + exp (−ρt) ] 显然影响稳定时间,它们被开环放大器的时间常数控制,特别是在2个时间常数中的时间较短的。这表明开环放大器的设计必须满足稳定时间的规定。
此分析的有两个主要结论:
- 反馈控制了给定开环放大器并给定开环时间常数 τ1 与 τ2 时终值上下振荡的幅度。
- 开环放大器决定了稳定时间。它确定了图3中的时标,开环放大器越快,时标越快。
顺便说一句,可以注意到实际中与线性双极点模型的偏离主要来自两个方面:其一,实际放大器的极点多余两个,零点也是;其二,实际放大器是非线性的,所以它们的阶跃响应会随着信号幅度变换。
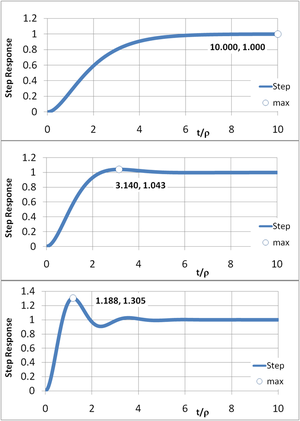 图4:α 的三个不同取值的阶跃响应。顶部:α = 4;中间:α = 2;底部:α = 0.5。随着 α 减小,极点分离也会减小,而过冲增加。
图4:α 的三个不同取值的阶跃响应。顶部:α = 4;中间:α = 2;底部:α = 0.5。随着 α 减小,极点分离也会减小,而过冲增加。
數學定義
File:Step response.jpg圖8:一動態系統、其輸入、輸出和其階躍響應的黑箱圖
本節以抽象概念下的動態系統 ,來提供形式性的數學定義。所有符號及假設列在下方。
,來提供形式性的數學定義。所有符號及假設列在下方。
 是系統的演化參數,為方便說明,簡稱為時間。
是系統的演化參數,為方便說明,簡稱為時間。 是系統在時間
是系統在時間 時的狀態,為方便說明,稱為輸出。
時的狀態,為方便說明,稱為輸出。 是動態系統的演化函數。
是動態系統的演化函數。 是動態系統的初始狀態。
是動態系統的初始狀態。 是单位阶跃函数。
是单位阶跃函数。
非線性動態系統
若針對一個一般的動態系統,其階躍響應可定義如下:

其階躍響應是系統輸入為單位階躍函數時的演化函數。表示式中H(t)為下標。
線性動態系統
對於一個線性非時變系統,令 ,,其階躍響應可以用單位階躍函數H(t)和系統衝激響應 h(t) 的卷積來表示:
,,其階躍響應可以用單位階躍函數H(t)和系統衝激響應 h(t) 的卷積來表示:

對線性非時變系統而言就是將後面的式子積分。相對的,對於線性非時變系統,階躍響應的微分即為衝激響應:
 .
.
不過此關係在非線性系統或是時變系統並不成立[2]。
對於一個線性非時變系統,其階躍響應可以用單位階躍函數H(t)和系統衝激響應 h(t) 的卷積來表示:
参考文献与注释
參照


.svg)





{kind=link}