
此条目页的主題是数学名词角。关于与「
角」標題相近或相同的条目页,請見「
角 (消歧义)」。
 Unicode中的角符號,Unicode碼位為U+2220
Unicode中的角符號,Unicode碼位為U+2220
在几何学中,角(拼音:jiǎo,注音符號:ㄐㄧㄠˇ)是由两条有公共端点的射线组成的几何对象。这两条射线叫做角的边,它们的公共端点叫做角的顶点。一般的角會假設在欧几里得平面上,但在非欧几里得几何中也可以定義角,特別是在球面幾何學中的球面角是用大圓的圓弧代替射线。角在几何学和三角学中有着广泛的应用。
几何之父欧几里得曾定义角为在平面中两条不平行的直线的相对斜度。普罗克鲁斯認為角可能是一種特質、一種可量化的量、或是一種關係。歐德謨認為角是相對一直線的偏差,安提阿的卡布斯認為角是二條相交直線之間的空間。欧几里得認為角是一種關係,不過他對直角、銳角或鈍角的定義都是量化的[1]。
平面角的大小定义是以两射线交点为圆心的圆被射线所截的弧长与半径之比,单位包括弧度和度、分、秒等。[2]
表示方法
角通常用三个字母表示:两条边上的点的字母写在两旁,顶点上的字母写在中间。图中的角用∠AOB或 表示。但若在不會產生混淆的情形下,也會直接用顶点的字母表示,例如角∠O。
表示。但若在不會產生混淆的情形下,也會直接用顶点的字母表示,例如角∠O。
在數學式中,一般會用希臘字母( )表示角的大小。為避免混淆,符號π一般不用來表示角度。
)表示角的大小。為避免混淆,符號π一般不用來表示角度。
角的測量
常見测量单位
以角的端点为圆心做圆弧。由于圆弧的半径和弧长成正比,而角是长度的比例,所以圆的大小不会影响角的测量。
- 角度:由角在圆上所切出的圆弧的长度除以圆的周长再乘以360的结果,一般用°来标记,读作“度”。一度可以继续分为60“分”或3600“秒”。角度在天文学和全球定位系统中有重要应用。
- 梯度:是角在圆上所切出的圆弧的长度除以圆的周长再乘以400的结果。
- 弧度:用角在圆上所切出的圆弧的长度除以圆的半径,單位是rad(中文名:弳)。弧度在数学中有广泛的应用。弧度還是国际单位制中规定的角的標準度量,但却不是中国法定计量单位,角度则是角在中国的法定计量单位。
- 採用弧度時,通常不會標示單位,例如:

其他测量单位
角度的量測可以視為弧長s和半徑r的比例,再依選用單位乘以一比例係數 。
。

例如以上的弧度、角度和梯度,其轉換係數 分別為
分別為 、360和400。
、360和400。
以下是一些其他的测量单位,對應不同的值。
- 圈數或轉數(
 ):是指完整旋轉一圈,依應用的不同,會簡寫為cyc、rev或rot,不過在每分鐘轉速(RPM)的單位中,只用一個字母r表示。
):是指完整旋轉一圈,依應用的不同,會簡寫為cyc、rev或rot,不過在每分鐘轉速(RPM)的單位中,只用一個字母r表示。
- 直角(
 ):是
):是 圈,是幾何原本中用的角度單位,直角
圈,是幾何原本中用的角度單位,直角 。在德文中曾用
。在德文中曾用 表示直角。
表示直角。
- 時角(
 ):)常用在天文學中,是
):)常用在天文學中,是 圈。此系統是用在一天一個週期的循環(例如星星的相對位置),其六十進制下的子單位稱為「時間分角」及「時間秒角」,這兩個單位和角度的角分及角秒不同,前者大小為後者的十五倍。1時角
圈。此系統是用在一天一個週期的循環(例如星星的相對位置),其六十進制下的子單位稱為「時間分角」及「時間秒角」,這兩個單位和角度的角分及角秒不同,前者大小為後者的十五倍。1時角 。
。
- 米位(
 ):此單位是指一個單位大約等於毫弧度的角度,有許多不同的定義,其數值從0.05625度到0.06度(3.375至3.6角分),而毫弧度約為0.05729578度(3.43775角分)。在北大西洋公約組織的國家中,米位定義為圓的
):此單位是指一個單位大約等於毫弧度的角度,有許多不同的定義,其數值從0.05625度到0.06度(3.375至3.6角分),而毫弧度約為0.05729578度(3.43775角分)。在北大西洋公約組織的國家中,米位定義為圓的 。其數值大約等於一個角度的弧長為一公尺,其半徑為一公里的角度(
。其數值大約等於一個角度的弧長為一公尺,其半徑為一公里的角度( )。
)。
- 角分(
 ):定義為一度的
):定義為一度的 ,是
,是 圈,會用 ′ 表示,例如3° 30′ 等於
圈,會用 ′ 表示,例如3° 30′ 等於 度,也就是3.5度,有時也會出現小數,例如
度,也就是3.5度,有時也會出現小數,例如 度。海里曾定義為在地球的大圓上一角分的弧長。
度。海里曾定義為在地球的大圓上一角分的弧長。
- 角秒 (
 ):定義為一角分的,會用 ″ 表示,例如3° 7′ 30″等於
):定義為一角分的,會用 ″ 表示,例如3° 7′ 30″等於 度,或是3.125 度。
度,或是3.125 度。
正角和負角
以上角的定義均未考慮數值為負的角。不過在一些應用時,會將角的數值加上正負號,以標明是相對參考物不同方向的旋轉。
在二維的笛卡兒坐標系中,角一般是以x軸的正向為基準,若往y軸的正向旋轉,則其角為正角,若往y軸的負向旋轉,則其角為負角。若二維的笛卡兒坐標系也是x軸朝右,y軸朝上,則逆時針的旋轉對應正角,順時針的旋轉對應負角。
一般而言, 角和一圈減去
角和一圈減去 所得的角等效。例如
所得的角等效。例如 和
和 等效,但這只適用在用角表示相對位置,不是旋轉概念時。旋轉和旋轉315°是不同的。
等效,但這只適用在用角表示相對位置,不是旋轉概念時。旋轉和旋轉315°是不同的。
在三維的幾何中,順時針及逆時針沒有絕對的定義,因此定義正角及負角時均需列出其參考的基準,一般會以一個通過角的頂點,和角所在平面垂直的向量為基準。
在導航時,導向是以北方為基準,正向表示順時針,因此導向45°對應東北方。導向沒有負值,西北方對應的導向為315°。
其他量測角大小的方法
除了量測角本身的大小外.也有其他的方式,可以量測角的大小。
坡度等於一個角的正切值,常用百分比或千分比來表示。當一個角的坡度小於5%時,其坡度近似於角以弧度表示的數值。
在有理幾何學中,一個角的大小是以伸展度(spread)來表示,伸展度定義為角對應正弦的平方,而任一角正弦的平方和該角補角正弦的平方相等。因此任一角和其補角在有理幾何學中是等同的。
角的种类
個別的角
- 零角
- 角度等於0°,或弧度為0的角。
- 锐角
- 角度大于0°且小于90°,或弧度大于0且小于
 的角。
的角。
- 直角
- 角度等於90°,或弧度为的角。
- 钝角
- 角度大于90°且小于180°,或弧度大于且小于
 的角。
的角。
- 平角
- 角度等於180°,或弧度为的角。
- 優角或反角
- 角度大於180°且小於360°,或弧度大於且小於的角。
- 周角
- 角度等於360°,或弧度為的角。
-
三个零角
-
直角
-
優角(或作反角)
-
周角
-
銳角(a)、鈍角(b)和平角(c)
以下是各角度的名稱及不同單位下的數值:
| 名稱
|
零角
|
銳角
|
直角
|
鈍角
|
平角
|
優角
|
周角
|
| 單位 |
範圍
|
| 轉
|

|

|

|

|

|

|

|
| 弧度
|

|

|

|

|
|

|

|
| 度
|

|

|

|

|

|

|

|
令x為該角度數。
角的組合
有三種特殊角的組合,其度數和均為特殊的值:
- 餘角:當兩個角的度數之和等於90°,即一個直角,這兩個角便是餘角。若兩個相鄰的角互為餘角,兩個非共用邊會形成直角。在欧几里得几何中,非直角的兩角即互為餘角。
- 若角A和B互為餘角,以下的數學式會成立:

- (一角的正切等於其餘角的餘切,一角的正割等於其餘角的餘割)
- 補角:當兩個角的度數之和等於180°,即一個平角,這兩個角便是互補角。若兩個相鄰的角互為餘角,兩個非共用邊會形成一直線。不過兩個不相鄰的角也可以是補角,例如平行四邊形中,任兩鄰角為互補角。圆内接四边形的對角也是互補角。
- 若點P為圓O外的一點,而過點P作圓的切線,切點分別在點T和點Q,則∠TPQ和∠TOQ為互補角。
- 兩互補角的正弦相等,其餘弦及正切(若有定義義)大小相等,但符號異號。
- 在欧几里得几何中,三角形兩角的和為第三角的補角。
 互為餘角的角a和角b
互為餘角的角a和角b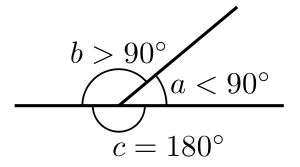 圖中的銳角和鈍角形成一組互補角
圖中的銳角和鈍角形成一組互補角
常用定理
同頂角
 同頂角
同頂角

直線上的鄰角
 直線上的鄰角
直線上的鄰角

與平行線有關的定理
 與平行線有關的定理
與平行線有關的定理
當 平行於
平行於 ,
,
 (同位角,
(同位角, )
) (內錯角,)
(內錯角,) (同旁內角,)
(同旁內角,)
由角度的關係也可以推得兩直線平行
- 當,平行於(同位角,相等)
- 當,平行於(內錯角,相等)
- 當,平行於(同旁內角,互補)
二曲線的夾角
 二曲線在P點的夾角定義為二曲線在P點切線A和B的夾角
二曲線在P點的夾角定義為二曲線在P點切線A和B的夾角
曲線和直線的的夾角或是二曲線間的的夾角定義為二曲線在交點處切線的夾角。
點積及其拓展
在欧几里得空间中,二個向量u及v的角和其點積及向量的長度有關:

依上式可以用二個平面(或曲面)的法向量,計算二者之間的夾角,也可以根據二歪斜線的向量計算其夾角。
內積
在一個抽象的實數内积空间中,在定義角時可以用內積  取代欧几里得空间的點積( · ):
取代欧几里得空间的點積( · ):

在複數的内积空间中,為了使餘弦的數值仍維持實數,因此需修改為

或者使用絕對值的標示:

後者不考慮向量的方向,因此是描述由向量 及
及 所生成的二個一維子空間
所生成的二個一維子空間 及
及 之間的夾角。
之間的夾角。
黎曼几何中的角
在黎曼几何中,利用度量张量來定義二條切線之間的夾角,其中U及V是切線向量,gij 是度量张量G的分量。

地理學及天文學中的角
以地理的觀點,地球上任何一個位置都可以用地理座標系統來表示,此系統標示位置的經度及緯度,兩者都以此點連至地球球心連線的角度來表示,經度是以格林威治子午線為參考基準,而緯度是以赤道為參考基準。
在天文學中,天球的一點可以用任何一種天球坐标系统來表示,不過其基準則因坐标系统不同而不同。天文學量測二顆星星的角距離時,會假想分別有二顆星星分別和地球連成的直線,再量測這二條直線的夾角,即為角距離。
天文學家也會用角直徑量測一物體的表觀大小。例如滿月的角直徑約為0.5°。小角公式可以將上述的角測量轉換為距離和大小的比值。
相關條目
參考資料
- ^ Heiberg, Johan Ludvig. Heath, T. L. , 编. Euclid. The thirteen books of Euclid's Elements 1. Cambridge University press. 1908: 177–178.
- ^ GB 3102.1-1993:空间和时间的量和单位(代替GB 3102.1-1986).1993年12月27日公布,1994年7月1日实施.
外部链接
|
|---|
|
| 线性(平动)的量 |
|
角度(转动)的量 |
| 量纲 |
— |
L |
L2 |
量纲 |
— |
— |
— |
| T |
时间: t
s |
位移积分: A
m s |
|
T |
时间: t
s |
|
|
| — |
|
距离: d, 位矢: r, s, x, 位移
m |
面积: A
m2 |
— |
|
角度: θ, 角移: θ
rad |
立體角: Ω
rad2, sr |
| T−1 |
頻率: f
s−1, Hz |
速率: v, 速度: v
m s−1 |
面積速率: ν
m2 s−1 |
T−1 |
頻率: f
s−1, Hz |
角速率: ω, 角速度: ω
rad s−1 |
|
| T−2 |
|
加速度: a
m s−2 |
|
T−2 |
|
角加速度: α
rad s−2 |
|
| T−3 |
|
加加速度: j
m s−3 |
|
T−3 |
|
角加加速度: ζ
rad s−3 |
|
|
|
| M |
质量: m
kg |
|
|
ML2 |
轉動慣量: I
kg m2 |
|
|
|---|
| MT−1 |
|
动量: p, 冲量: J
kg m s−1, N s |
作用量: 𝒮, actergy: ℵ
kg m2 s−1, J s |
ML2T−1 |
|
角动量: L, 角衝量: ι
kg m2 s−1 |
作用量: 𝒮, actergy: ℵ
kg m2 s−1, J s |
| MT−2 |
|
力: F, 重量: Fg
kg m s−2, N |
能量: E, 功: W
kg m2 s−2, J |
ML2T−2 |
|
力矩: τ, moment: M
kg m2 s−2, N m |
能量: E, 功: W
kg m2 s−2, J |
| MT−3 |
|
加力: Y
kg m s−3, N s−1 |
功率: P
kg m2 s−3, W |
ML2T−3 |
|
rotatum: P
kg m2 s−3, N m s−1 |
功率: P
kg m2 s−3, W |
|
|


 三个零角
三个零角 直角
直角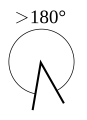 優角(或作反角)
優角(或作反角) 周角
周角 銳角(a)、鈍角(b)和平角(c)
銳角(a)、鈍角(b)和平角(c)








